





The Mechanical Engineering Department and the Center for Engineering Education and Outreach at Tufts University are releasing an alpha version of a ROS client library for Labview with the goal of creating a platform independent and intuitive ROS environment.
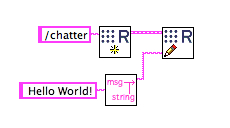
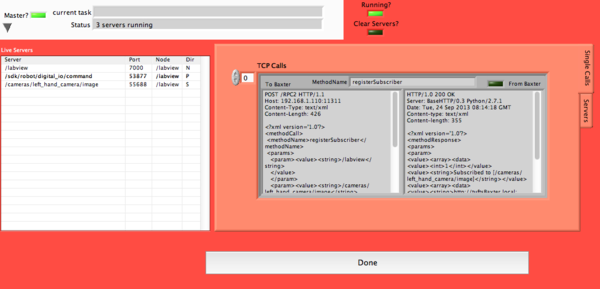
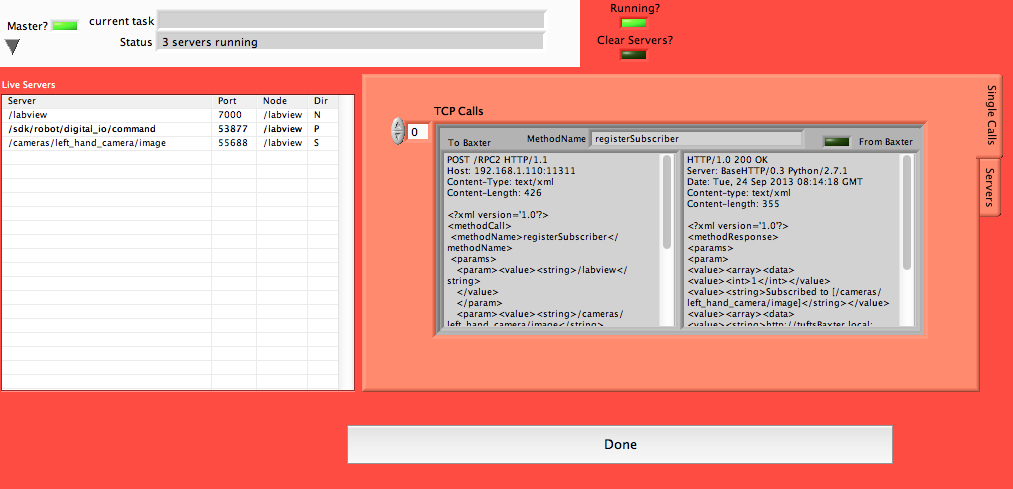
In its current state, the library supports publishers, subscribers, and service clients on predefined topics and contains a partial implementation for the Baxter Research Robot from Rethink Robotics. The library was built in Labview 2010 on OS X and has been tested successfully in Windows 7.
This is a prerelease and should not be expected to remain stable. UI and structural changes should e expected along with further feature support. If you are interested please try it out and give us feedback at ros-sig-rosforlabview@googlegroups.com You can find the package on github at https://github.com/chris-smith/ROSforLabview
Leave a comment