





Just in the time for Thanksgiving, we've got some new things for the ROS and ROS-Kinect community to play with.
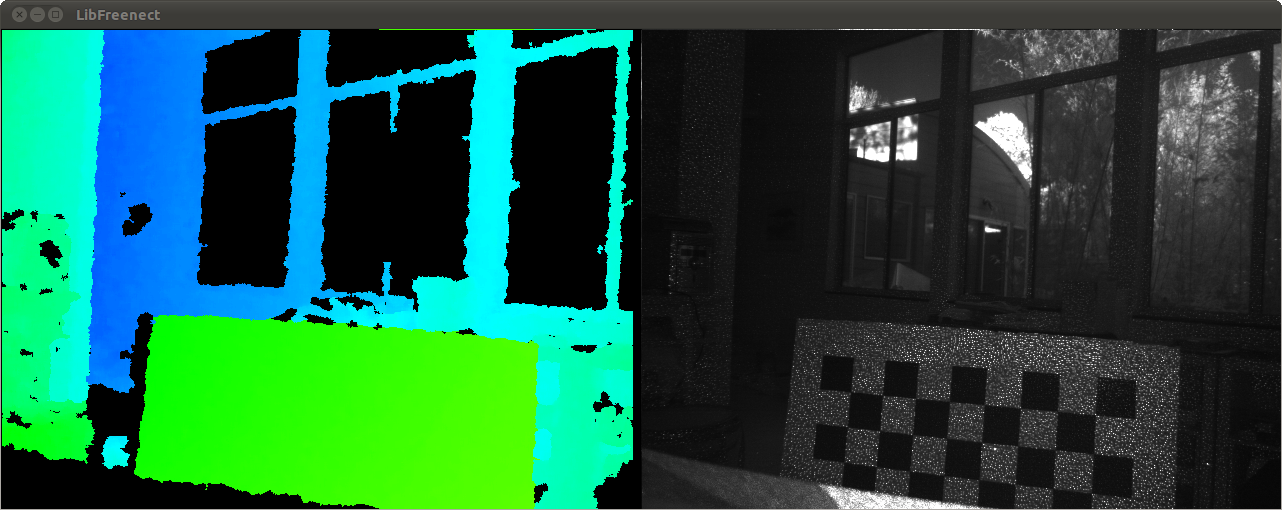
- Access to Kinect's raw IR image
- Kinect debians for C Turtle
- ROS debians for Ubuntu Maverick on C Turtle
For the Kinect, we've achieved a major breakthrough: access to the IR camera image. Now that we have access to the raw IR camera image, instead of just the depth image, we can do monocular and stereo calibration using the regular ROS calibration tools and methods. We're taking a short break for Thanksgiving, but we should have RGB/depth calibration by the end of the week.
Regularly ROS-Kinect users can just update to the get these changes -- or you can try
sudo apt-get update
sudo apt-get install ros-cturtle-kinect
We have a lot more in the works, so stay tuned. Happy Thanksgiving!
Leave a comment