
RoadNarrows is pleased to announce the compatibility of its Hekateros
family of robotic manipulators with ROS,
the Robot Operating System, making them easier than ever to use
in research and light manufacturing. Developed by the Open
Source Robotics Foundation, ROS provides a standardized framework
allowing easy integration of robots, sensors, and computing platforms
to solve complex problems through the combination of simple
ROS-enabled components.
Hekateros
manipulators are available
for sale in 4DOF (articulated planar arm) and 5DOF (articulated
planar arm + rotating base) configurations. The Hekateros platforms
are ideal for applications and research in robotic control systems,
visual-servoing, machine intelligence, artistic installations, and
light manufacturing.
Standard Hekateros models have an impressive
range of motion (see below) with a fully extended reach of
approximately 1m and a payload capacity of nearly 1kg. Each arm can
be special-ordered to meet custom length and loading requirements in
order to suit the needs of almost any application. All versions of
Hekateros come with a default end-effector based on the RoadNarrows
Graboid
gripper, with a built-in webcam for visual-servoing applications.
The wrist and rotating base both provide continuous rotation while
passing power and data (USB, video, Dynamixelâ„¢ ,GPIO and I2C) to
the processor in the base. Open mechanical and electrical interfaces
allow for the integration of additional sensors and actuators beyond
those included on the standard arm. Add-ons may be integrated
directly into the base of the robot, at an equipment deck on top of
the rotating base, or at the open end-effector interface.
Hekateros manipulators are network enabled, and onboard processing is
powered by the 1GHz ARM processor of the Gumstix®
Overo®
FireSTORM COM. This allows for autonomous operation of
Hekateros in isolation from a computing infrastructure, or the
ability to connect Hekateros with a powerful computing array for
computationally intensive tasks. Multiple manipulators may also be
configured for simultaneous and cooperative operation, and can easily
be integrated with a variety of networked platforms and sensors.
The
Hekateros platform is built around the powerful Dynamixelâ„¢
actuators by ROBOTISâ„¢,
which provide many advanced features such as: continuous rotation
through 360 degrees; high-resolution encoders; excellent torque,
position, and velocity feedback and control; and an extensive
low-level interface to monitor the servo state and health. On top of
the Dynamixel firmware, RoadNarrows has built libraries and utilities
that expose all of the features of Dynamixel servos through a clean
and uniform C++ interface. Key features of the RoadNarrows Dynamixel
library include virtual odometry for continuous rotation, a software
PID for motion control in continuous rotation, and a command line
utility (dynashell) for accessing and controlling a chain of
Dynamixel servos. The Hekateros ROS packages bring the full power of
Dynamixel actuators to ROS.
The Hekateros ROS interface exposes all functionality of the
Hekateros manipulators as services, subscriptions and action servers.
The control interface also publishes extensive state data on every
aspect of the arm. The hekateros_control node conforms with
ROS standards, such as the ROS industrial interface and MoveIt!
motion planning suite.
In addition to the hekateros_control node, users of the
Hekateros ROS interface are also provided with:
a graphical interface (hekateros_panel) that provides easy
access to every feature of the control node,
numerous launch files including live demos, simulations, and
integration with advanced motion planning libraries, and
extensive documentation in the wiki.
More
detailed information about the Hekateros
ROS interface is available on the wiki pages on GitHub.
The
Hekateros platform was developed thanks in part to the support of the
NSF SBIR program under grant number 1113964.
Please
direct all inquiries to info@roadnarrows.com.
About
RoadNarrows LLC
Based in Loveland,
Colorado, RoadNarrows is a privately-held robotics and technologies
company founded in 2002. RoadNarrows Research & Development
develops intelligent peripheral components and accessories, including
cameras, mobile sensor architectures, and open-source platform
software, to give robotics researchers advanced time- and
resource-saving tools. RoadNarrows' retail operation sells and
provides technical support for some of the most popular robotic
product lines used by the academic and research community world-wide.
For
more information, visit: www.roadnarrows.com.
Links:
The
Hekateros project main page: http://www.roadnarrows.com/Hekateros/
Hekateros
for sale on the RoadNarrows Store:
http://www.roadnarrows-store.com/hekateros-arm.html
Hekateros'
range of motion on YouTube:
https://www.youtube.com/watch?v=13lpd655wC4
The
RoadNarrows Graboid Gripper for sale on the RoadNarrows store:
http://www.roadnarrows-store.com/roadnarrows-graboid-series-d.html
The
Gumstix®
Overo® FireSTORM COM, used in
Hekateros, for sale on the RoadNarrows store:
http://www.roadnarrows-store.com/gumstix-overo-firestorm-com.html
The
Gumstix® main page: https://www.gumstix.com/
Dynamixelâ„¢
servos by ROBOTISâ„¢ for sale on the RoadNarrows Store:
http://www.roadnarrows-store.com/manufacturers/robotis/dynamixel-servos.html
The
ROBOTISâ„¢ main page: http://www.robotis.com/
The
MoveIt! main page: http://moveit.ros.org/
The
Hekateros ROS interface documentation wiki pages on GitHub:
https://github.com/roadnarrows-robotics/hekateros/wiki
NSF GRANT
SUPPORT AND DISCLAIMER - The project described above is supported by
Grant Number 1113964. from the National Science Foundation. Any
opinions, findings, and conclusions or recommendations expressed in
this material are those of the author(s) and do not necessarily
reflect the views of the National Science Foundation.
















 Weeding in organic orchards is a tedious process done either mechanically or by weed burning. Researchers at University of Southern Denmark and Aarhus University created the
Weeding in organic orchards is a tedious process done either mechanically or by weed burning. Researchers at University of Southern Denmark and Aarhus University created the 












 DARPA is having a
DARPA is having a 




 I Heart Robotics
I Heart Robotics 






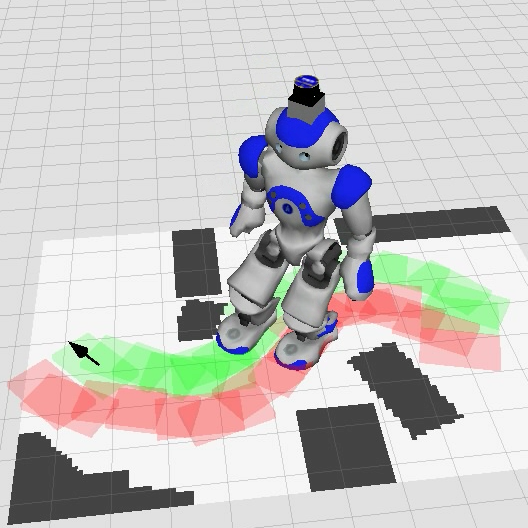
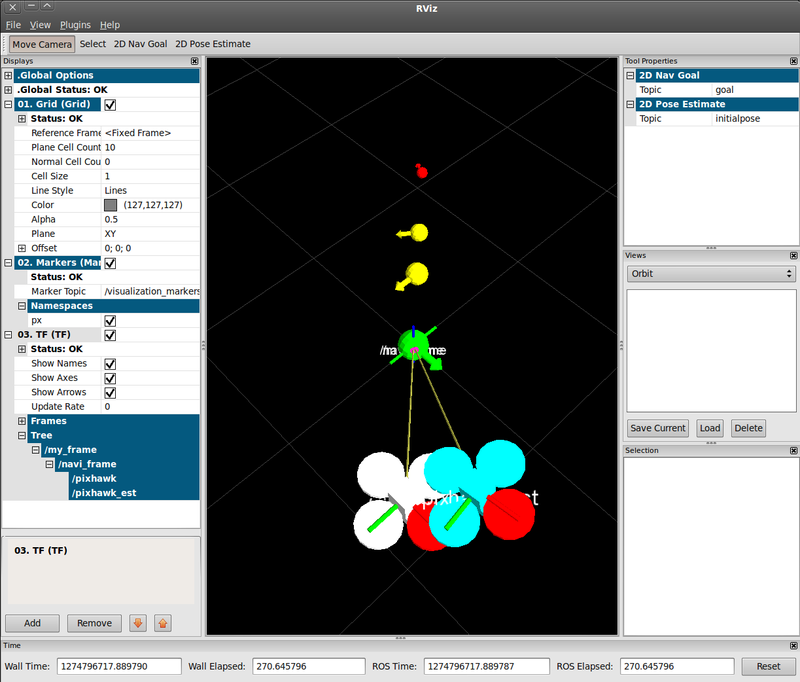
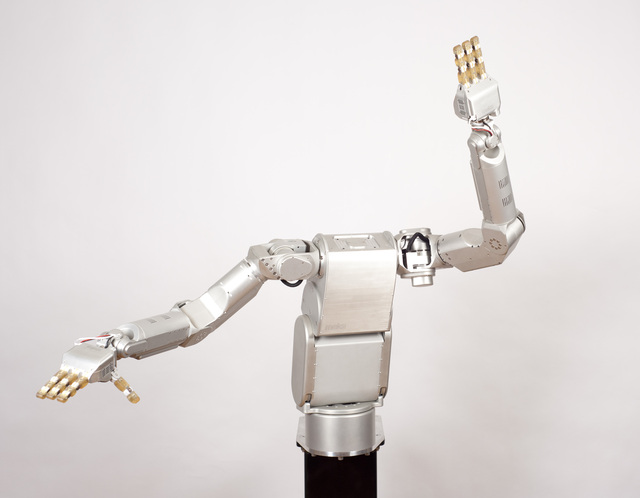
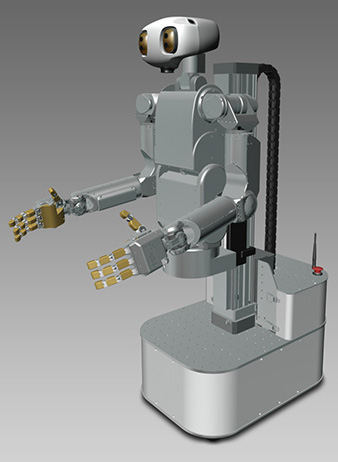
 The first Nao driver for ROS
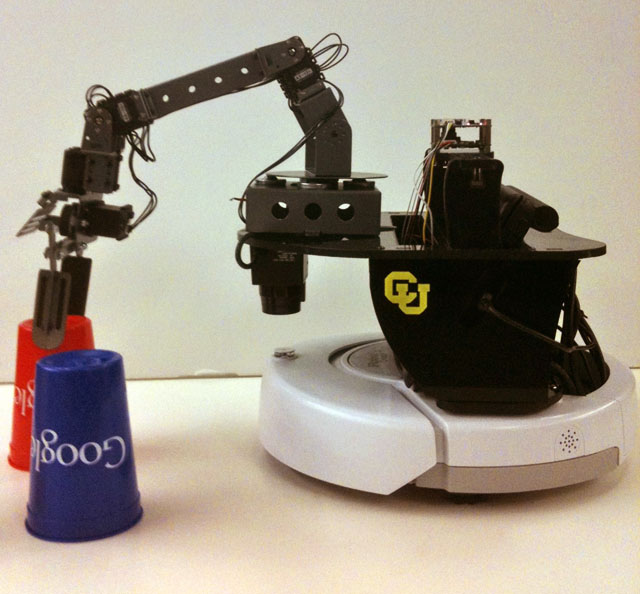
The first Nao driver for ROS  With so many open-source repositories offering ROS libraries, we'd like to highlight the many different robots that ROS is being used on. It's only fitting that we start where ROS started with STAIR 1: STanford Artificial Intelligence Robot 1. Morgan Quigley created the Switchyard framework to provide a robot framework for their mobile manipulation platform, and it was the lessons learned from building software to address the challenges of mobile manipulation robots that gave birth to ROS.
With so many open-source repositories offering ROS libraries, we'd like to highlight the many different robots that ROS is being used on. It's only fitting that we start where ROS started with STAIR 1: STanford Artificial Intelligence Robot 1. Morgan Quigley created the Switchyard framework to provide a robot framework for their mobile manipulation platform, and it was the lessons learned from building software to address the challenges of mobile manipulation robots that gave birth to ROS.{kind=link}