





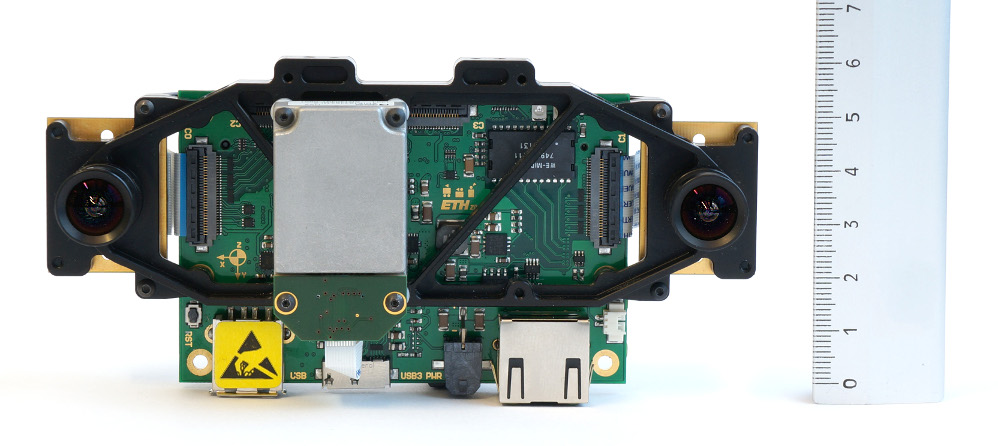
The VI-Sensor is a light-weight, fully-calibrated and time-synchronized hardware platform for visual-inertial odometry applications, e.g. for UAV navigation in cluttered environments. It features a high-quality global shutter HDR stereoscopic camera and an industrial-grade inertial measurement system. A detailed spec-sheet can be found here.
The Early Adopter package includes:
- VI-Sensor (factory calibrated: intrinsic, spatial & temporal inter-sensor)
- Linux driver (ROS enabled)
- SDK with example code for working with image and IMU data in openCV and/or ROS
- Ready for stereo visual odometry framework viso2
- Power supply cable kit
- Access to the Wiki page
- Driver and firmware updates
- VI-Sensor protection case
A detailed spec-sheet can be found here.
Price: EUR 3'900.00 (*)
If you are interested in receiving an Early Adopter quotation, please contact us via sales@skybotix.com
Please submit your purchase order until May 31th. Purchase orders received after this date cannot be taken into account for the Early Adopter Program.
We are looking forward to hearing from you.
Leave a comment