This year ROS celebrates another anniversary--four years of a great community building open-source libraries for robotics.
We're excited to celebrate this milestone by announcing ROSCon 2012, the first ROS developer's conference. On May 19-20 in St. Paul, Minnesota (following ICRA), ROS developers from around the globe will gather to learn, share, exchange, and network on all topics ROS.
The conference features:
- Presentations by ROS experts, including robot-specific development, useful packages and stacks, developer tools, and embedded systems.
- Tech talks and tutorials on the new tools and libraries.
- Updates and discussion about the tools and libraries you already use.
- Lightning talks and many informal sessions to learn more and share ideas.
The call for presentation proposals is now open, and the deadline for submissions is 12/4/2011. To learn more, go to http://roscon.ros.org/.
Continued Growth
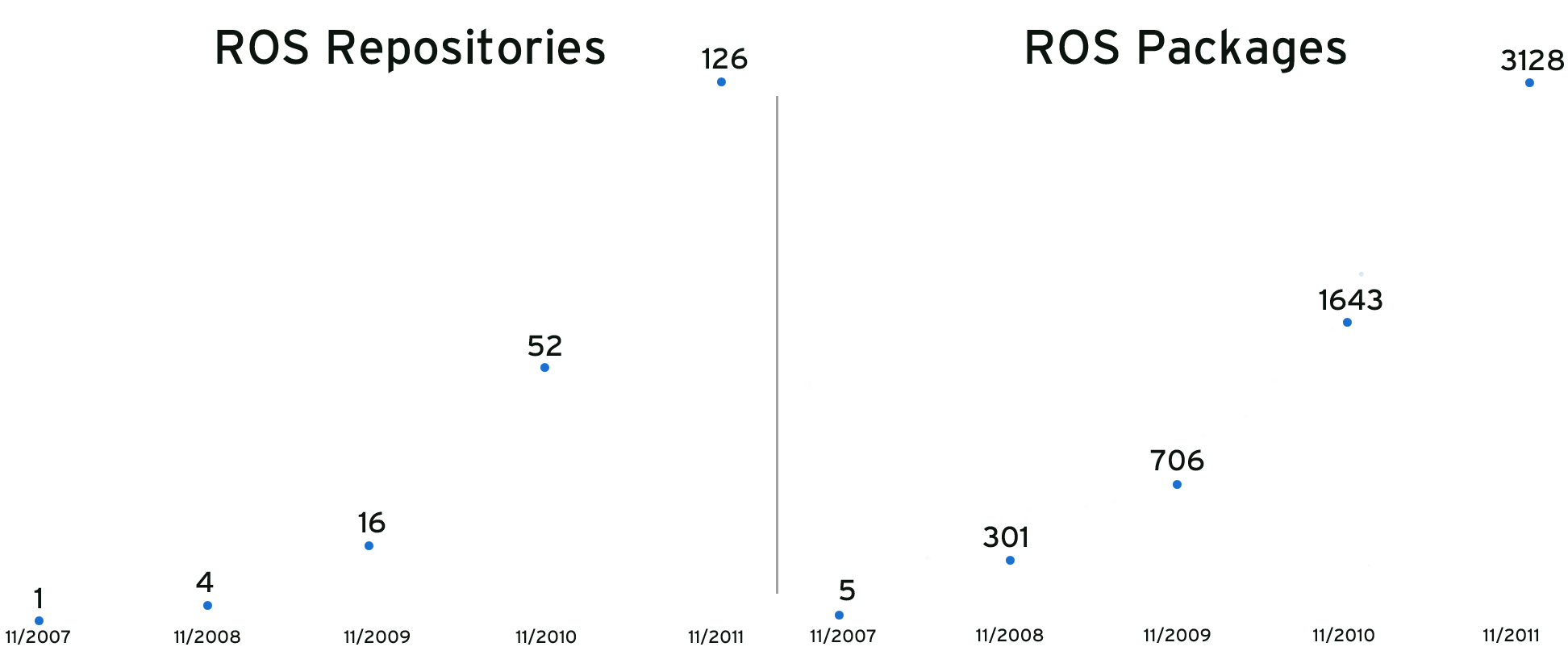
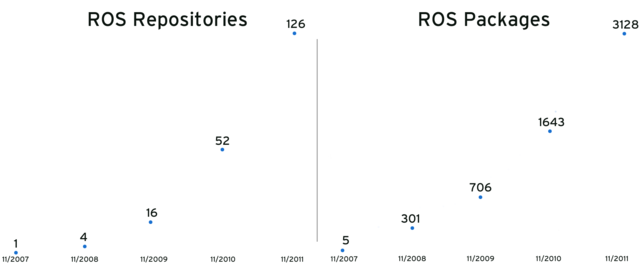
By all measures, the ROS community has doubled in size since last year. The number of open-source, public code repositories grew from 50 in 2010 to 126 in 2011, and the number of ROS packages increased from 1643 to 3128. This explosive growth was driven in large part by the release of the Microsoft Kinect and has resulted in many new innovative applications.
If you're interested in more information on the growth of ROS, you can see your community metrics report from 2011.
Improved Libraries and New Platforms
The third ROS distribution release, Diamondback, kicked off 2011 with Kinect and OpenNI compatibility, as well as smaller, easier-to-use libraries. Diamondback also introduced our open stack release system, which enables contributors around the world to provide their libraries as part of the ROS distributions.
The fourth and most recent release, Electric Emys, marked a milestone by providing complete, stable libraries for arm_navigation and PCL to complement upgraded build, communication, navigation, and image processing libraries.
Electric Emys also expanded ROS support so you can use it on various low-powered platforms and more operating systems. There are much-improved capabilities on:
- Android and Java (Damon Kohler, Keith Hughes, and Lorenz Mösenlechner)
- Arduino (Michael Ferguson and Adam Stambler)
- Windows (Daniel Stonier)
- OS X (William Woodall)
- Python 3 (Michael Karg, Severin Lemaignan, and Lorenz Mösenlechner)
Thanks to the developers above that made this possible. Thanks also go to the many institutions and individuals that have used the new stack release system to contribute libraries to the Diamondback and Electric releases, including:
Open Processes
ROS is now in use on so many platforms and in such a variety of applications that it's difficult to have a centralized planning process for releases. Building on the ROS Enhancement Proposal (REP) process, the special interest groups (SIGs) you've created now plan future releases of ROS. Anyone can create one. Anyone can participate and contribute.
In addition to the REP and SIG processes, more community members are stepping forward to take over core ROS libraries to guide their development. Thank you to Chad Rockey (laser_drivers), Brett Grandbois (dynamic_reconfigure), and Ruben Smits (orocos_kinematics_dynamics) for taking on this important responsibility, as well as thanks to Jack O'Quin (camera_drivers) for his continued and excellent stewardship.
A final thank you goes to the many, many people that make answers.ros.org happen -- it is the primary resource for helping users get things done. In particular, thanks to the frequent contributors: Christian Dornhege, Eric Perko, Jack O'Quin, Martin Günther, Lorenz Mösenlechner, Michael Carroll, Koen Buys, Ivan Dryanovski, Chad Rockey, Andy Somerville, Mac Mason, Felix Endres, Patrick Goebel, Dimitri Prosser, David Lu, Antons Rebguns, Stefan Kohlbrecher, and Raphael Favier.
What's New for 2012: ROS Fuerte, Groovy Galapagos and ROSCon
ROS Fuerte Turtle and ROS Groovy Galapagos will be released in 2012. Fuerte, the March 2012 release, has 16 SIGs in the open-source robotics community collaborating on many improvements to ROS communication protocols and tools, as well as the libraries for motion planning, perception, manipulation, and simulation. Fuerte focuses on making libraries better and easier to use, both with and without ROS middleware. The build infrastructure will undergo major changes, and hopefully you can use these numerous libraries in more applications.
ROSCon 2012 happens in May, and we hope the many people that make ROS happen -- REP writers, SIG participants, stack maintainers, answers.ros.org participants -- can meet all under one roof and carry us on to ROS Groovy Galapagos!