





PIXHAWK is an open-source framework and middleware for micro air vehicles (MAVs) that focuses on computer vision. The framework is being developed by students at ETH Zurich, and they recently won second place the EMAV 2009 Indoor Autonomy Competition. The PIXHAWK software runs on several MAVs, including the PIXHAWK Cheetah Quadrotor and the Pioneer Coax Helicopter. The Cheetah Quadrotor was demoed at ECCV 2010 demonstrating stable autonomous flight using onboard computer vision and some interaction using ball tracking. A parts lists and assembly instructions for the Cheetah are available on the PIXHAWK web site.
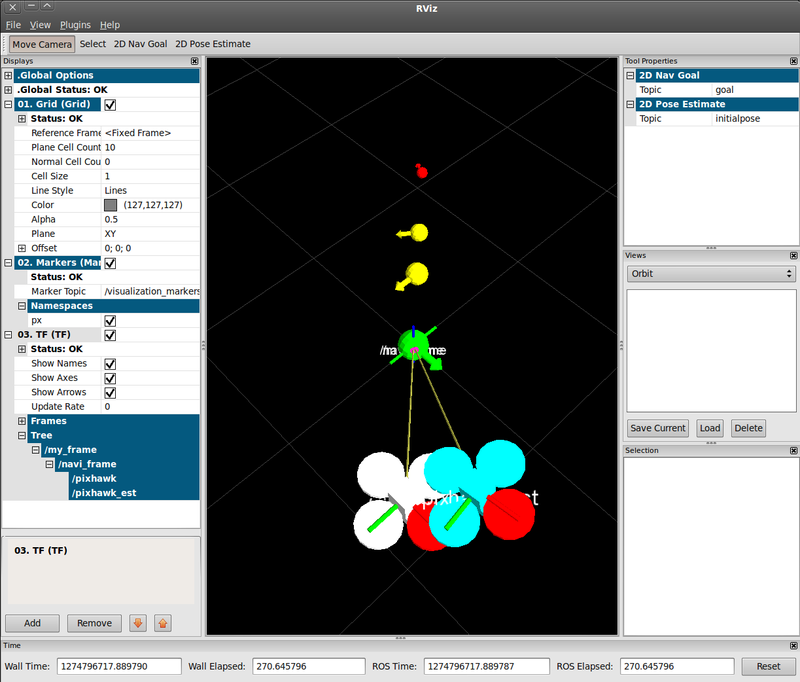
The PIXHAWK middleware, MAVLink, runs on top of MIT's LCM middleware system and the PIXHAWK team has also integrated their system with ROS to provide access to tools like rviz. With rviz, PIXHAWK users can visualize a variety of 3D data from the MAVs, including pose estimates from the computer vision algorithms, as well as waypoints and IMU measurements. Other ROS processes can easily be interfaced with a PIXHAWK system.
The PIXHAWK team has also made their own open-source contributions to visualization tools for MAVs. Their QGroundControl mission planning tool provides a variety of visualizations, including real-time plotting of telemetry data. It was was initially developed for PIXHAWK-based systems, but now open to the whole MAV community.
The rest of the PIXHAWK software, including computer vision framework and flight controller software, is also available as open source. You can checkout their winter 2010 roadmap, which includes release of their ARTK hovering code base with ROS support.
The PIXHAWK team is also taking orders for a batch production run of their pxIMU Autopilot and Inertial Measurement Unit Board ($399). It provides a compact, integrated solution for those building their own quadrotors. The firmware is open source and compatible with the PIXHAWK software like QGroundControl.
Leave a comment