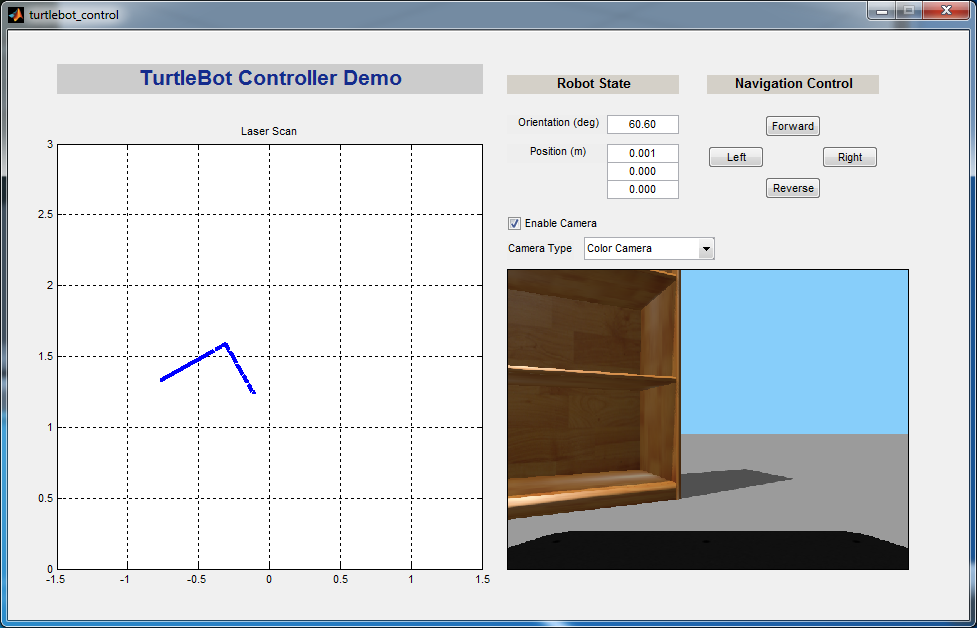
For more information see the submission on the Matlab Central File Exchange: http://www.mathworks.com/matlabcentral/fileexchange/44853-use-matlab-ros-io-package-to-interact-with-the-turtlebot-simulator-in-gazebo
 |
About | Support | Status | answers.ros.org | |
     |
||
TrackBack URL: https://www.ros.org/mt-tb.cgi/861
Find this blog and more at planet.ros.org.
This page contains a single entry by Tully Foote published on February 26, 2014 10:39 AM.
Introducing ROStful: ROS over RESTful web services was the previous entry in this blog.
Shadow Robot's RoNeX SPI Module simplifies ROS Interfacing is the next entry in this blog.
Find recent content on the main index or look in the archives to find all content.
Leave a comment