





The Intelligent Autonomous Systems Group at TU München (TUM) built TUM-Rosie with the goal of developing a robotics system with a high-degree of cognition. This goal is driving research in 3D perception, cognitive control, knowledge processing, and highlevel planning. TUM is building their research on TUM-Rosie using ROS and has setup the open-source tum-ros-pkg repository to share their research, libraries, and hardware drivers. TUM has already released a variety of ROS packages and is in the process of releasing more.
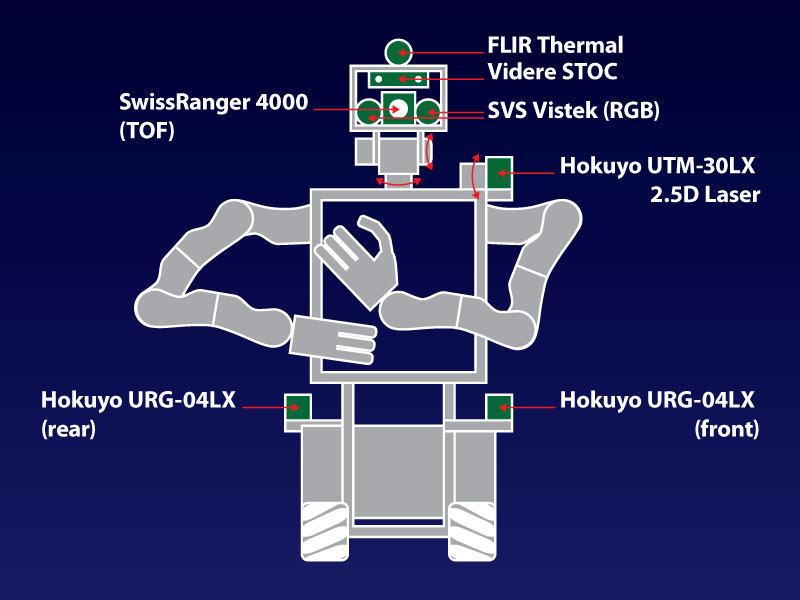
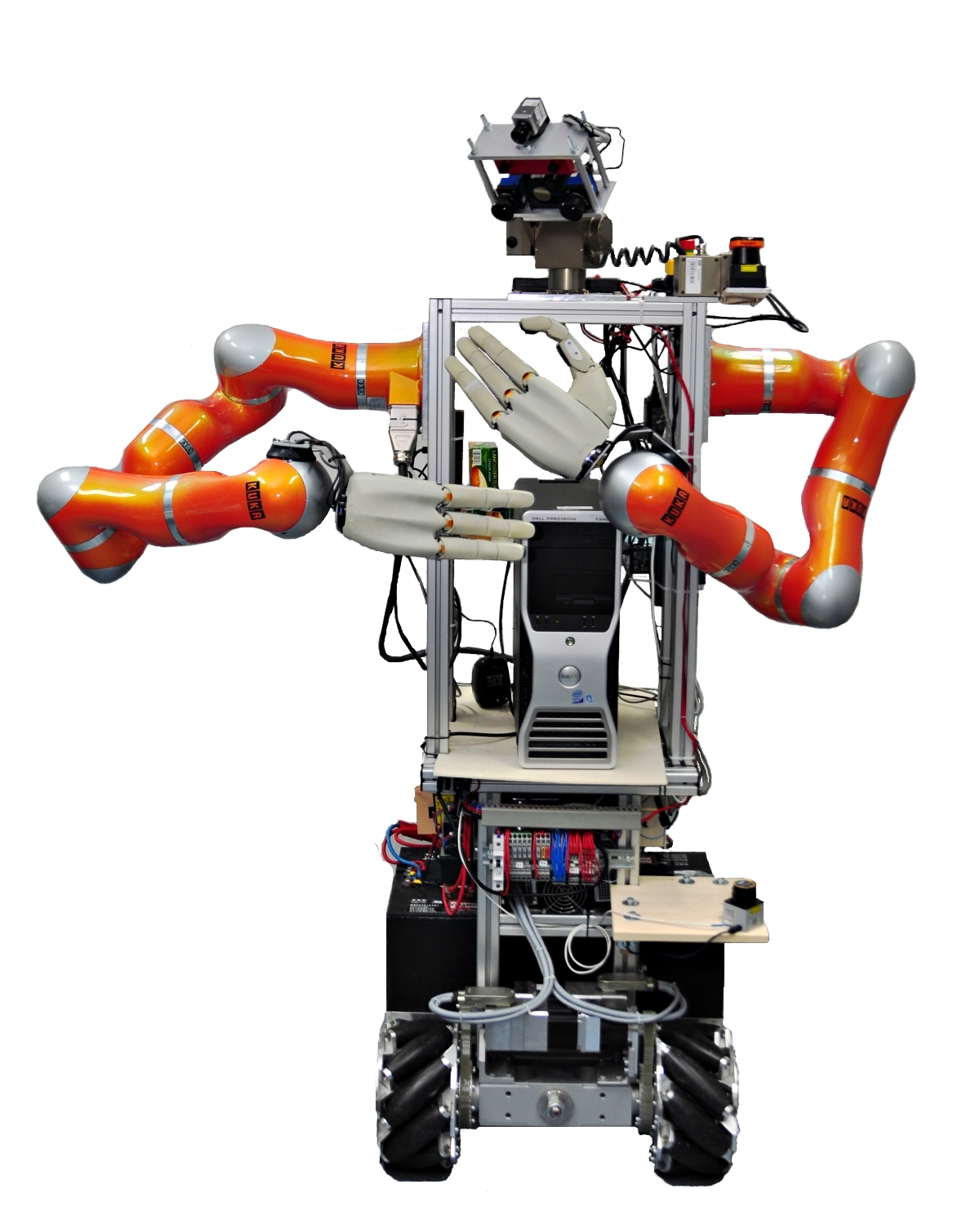
TUM-Rosie is a mobile manipulator built on a Kuka mecanum-wheeled omnidrive base, with two Kuka LWR-4 arms and DLR-HIT hands. It has a variety of sensors for accomplishing perception tasks, including a SwissRanger 4000, FLIR thermal camera, Videre stereo camera, SVS-VISTEK eco274 RGB cameras, a tilting "2.5D" Hokuyo UTM-30LX lidar, and both front and rear Hokuyo URG-04LX lidars.
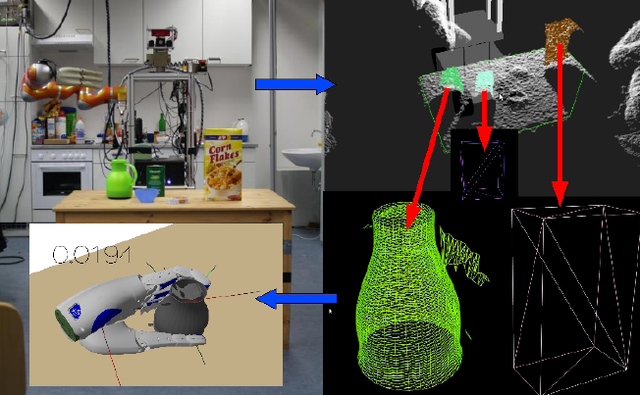
One of the new libraries that TUM is developing is the cloud_algos package for 3D perception of point cloud data. cloud_algos is being designed as an extension of the pcl (Point Cloud Library) package. The cloud_algos package consists of a set of point-cloud-processing algorithms, such as a rotational object estimator. The rotational object estimator enables a robot to create models for objects like pitchers and boxes from incomplete point cloud data. TUM has already released several packages for semantic mapping and cognitive perception.
TUM is also working on systems that combine knowledge reasoning with perception. The K-COPMAN (Knowledge-enabled Cognitive Perception for Manipulation) system in the knowledge stack generates symbolic representations of perceived objects. This symbolic representation allows a robot to make inferences about what is seen, like what items are missing from a breakfast table.
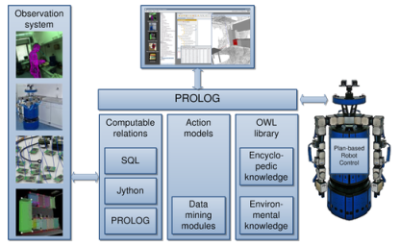
In the field of knowledge processing and reasoning for personal robots, TUM developed the KnowRob system that can provide:
- spatial knowledge about the world, e.g. the positions of obstacles
- ontological knowledge about objects, their types, relations, and properties
- common-sense knowledge, for instance, that objects inside a cupboard are not visible from outside unless the door is open
- knowledge about the functions of objects like the main task a tool serves for or the sequence of actions required to operate a dishwasher
KnowRob is part of the tum-ros-pkg repository, and there is a wiki with documentation and tutorials.
 At the high level, TUM is working on CRAM (Cognitive Robot Abstraction Machine), which provides a language for programming cognitive control systems. The goal of CRAM is to allow autonomous robots to infer decisions, rather than just having pre-programmed decisions. Practically, the approach will enable tackling of the complete pick-and-place housework cycle, which includes setting the table, cleaning the table as well as loading the dishwasher, unloading it and returning the items to their storage locations. CRAM features showcased in this scenario include the probabilistic inference of what items should be placed where on the table, what items are missing, where items can be found, which items can and need to be cleaned in the dishwasher, etc. As robots become more capable, it will be much more difficult to explicitly program all of their decisions in advance, and the TUM researchers hope that CRAM will help drive AI-based robotics.
At the high level, TUM is working on CRAM (Cognitive Robot Abstraction Machine), which provides a language for programming cognitive control systems. The goal of CRAM is to allow autonomous robots to infer decisions, rather than just having pre-programmed decisions. Practically, the approach will enable tackling of the complete pick-and-place housework cycle, which includes setting the table, cleaning the table as well as loading the dishwasher, unloading it and returning the items to their storage locations. CRAM features showcased in this scenario include the probabilistic inference of what items should be placed where on the table, what items are missing, where items can be found, which items can and need to be cleaned in the dishwasher, etc. As robots become more capable, it will be much more difficult to explicitly program all of their decisions in advance, and the TUM researchers hope that CRAM will help drive AI-based robotics.
Researchers at TUM have also made a variety of contributions to the core ROS system, including many features for the roslisp client library. They are also maintaining research datasets for the community, including a kitchen dataset and a semantic database of 3d objects, and they have contributed to a variety of other open-source robotics systems, like YARP and Player/Stage.
Research on the TUM-Rosie robot has been enabled by the Cluster of Excellence CoTeSys (Cognition for Technical Systems). For more information:
- TUM-Rosie hardware and software description
- IAS Video Channel
- tum-ros-pkg on ROS.org
- Datasets
- Overview Article: Towards Performing Everyday Manipulation Activities
- Overview Article: Towards Automated Models of Activities of Daily Life
- Overview Article: Generality and Legibility in Mobile Manipulation
Leave a comment