





Announcement from David Lu of Washington University in St. Louis to ros-users
Hey all,
Today I am pleased to announce the release of 2 new stacks and 1 new package as part of the Washington University repository.
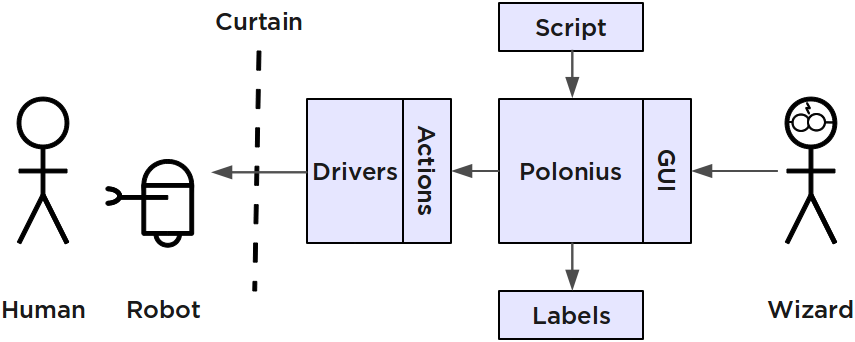
First, the Polonius stack. Polonius is a robot control interface designed for running Wizard of Oz style experiments. This work was presented in poster form at HRI2011, and was also used to control a short robot theatre piece we put on last September, the video for which is being presented at the Robots and Art workshop at ICRA next week.
Second, the motion_capture stack. This contains our initial work at incorporating motion capture data into ROS, initially just using the c3d data format. Tools for analyzing this sort of data will be released in the future.
Third, a ROS Wiki documentation tool, roswiki_node. This package contains code to make documentation a bit easier by automatically generating the CS/NodeAPI code used on the wiki automatically using your source code.
Feedback is always welcome, either by emailing me or through our SourceForge project page.
Cheers, and Happy May.
-David Lu!!
Leave a comment