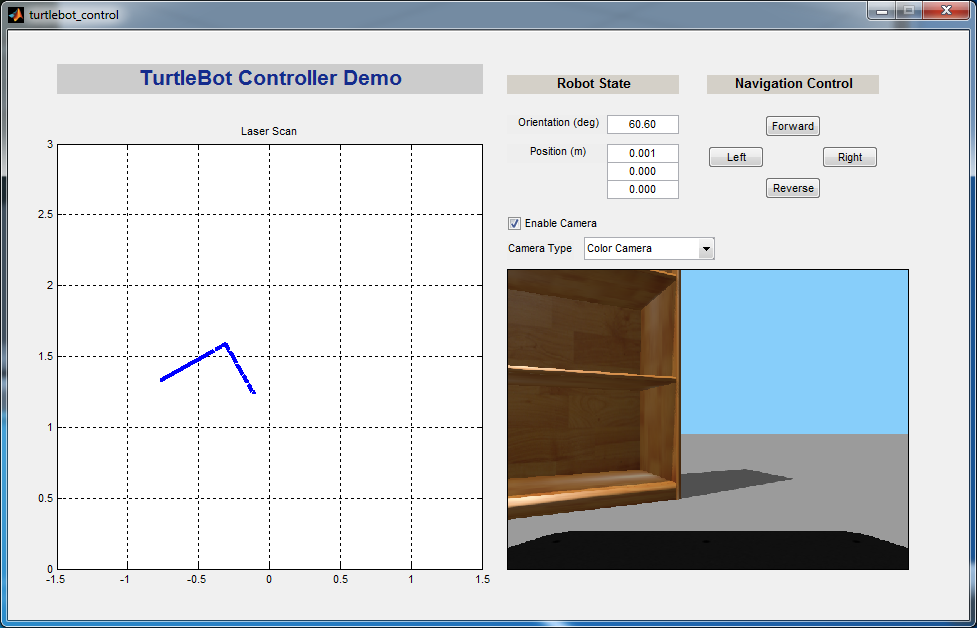
For more information see the submission on the Matlab Central File Exchange: http://www.mathworks.com/matlabcentral/fileexchange/44853-use-matlab-ros-io-package-to-interact-with-the-turtlebot-simulator-in-gazebo
 |
About | Support | Status | answers.ros.org | |
     |
||
Thalmic Labs and Clearpath Robotics have joined forces to prove gesture controlled robots are possible. Thalmic Labs, developers of Myo Gesture Control, released the Myo alpha developer unit to Clearpath Robotics for testing. Clearpath has successfully integrated the Myo armband with their Husky Unmanned Ground Vehicle to start, stop and drive the vehicle using simple arm movements.
"There are a lot of interesting applications for using the Myo for robot control and our team is very excited to have the opportunity to work with the Alpha dev unit," said Ryan Gariepy, Chief Technical Officer at Clearpath Robotics. "We've been eagerly following Thalmic's progress and we've got a dozen different robots here we could do some more tests with."
Clearpath Robotics used the Robot Operating System (ROS) for most of the integration work. The Husky software package exposes a standard Twist interface, so the team was required to convert the Myo data into that format to create compatibility. The team did so by using their experimental cross-platform serialization server in socket mode.
For Myo integration and development, Clearpath Robotics added standard Windows Socket code into the provided Thalmic example code, and then determined the proper mapping from the Myo data to the desired robot velocity using timeouts and velocity limits. Further details on Myo integration cannot be released at this time.
From Nikolai Ensslen via ros-users@
Hi all,
in December we released "Subscribing Submarine" an alpha version of rosc, that was announced at last year's ROSCon. For some reason we forgot to mention this here and invite you to review and play around with it. - Hereby I'm catching up on this, and of course also encourage you to join the further development!
rosc is a dependency-free ROS client implementation in ANSI C which aims to support small embedded systems as well as any operating system. Its long-term goal is to become a hardened, efficient and highly portable implementation of the ROS middleware (including future evolutions of it), making it a good choice for use in industrial applications or product development.
Essential features:
Planned future extensions:
You can try out the alpha under Linux now. The code is beyond experimental, but not yet mature enough for critical setups.
In ROS Wiki, see http://wiki.ros.org/rosc
Find the code at https://github.com/synapticon/
Documentation http://synapticon.github.io/
Have fun,
Nik

From Manos Tsardoulias

Dear all,
We are happy to announce the first release (v0.1) of STDR Simulator (Simple Two Dimensional Robot Simulator) ROS package. It is a fact that a variety of robot simulators is available. Some characteristic examples are the Player/Stage/Gazebo project, USARSim, Webots, V-REP and many many others. We acknowledge that these frameworks are state-of-the-art and provide a vast amount of services, ranging from realistic 3D simulation to hardware support. Though the prize you ought to pay is that they are either extremely architecturally complicated and confuse the novice robotics researcher or they require a lot of computational power to provide realistic 3D simulation. In addition, almost all of the pre-mentioned frameworks have a lot of dependencies that make the installation procedure time consuming and sometimes impossible due to dependency errors. What we envisioned was a simple simulator that its installation wouldn't require more than a few clicks, one that would allow the robotic researcher to materialize their ideas in a simple and efficient manner.
That is why we decided to create STDR Simulator. STDR Simulator's two main goals are:
It doesn't aim to be the most realistic simulator, nor the one with the most functionalities. Our intention is to make a single robot's, or a swarm's simulation as simple as possible, by minimizing the needed actions the researcher has to perform to start theirs experiment. In addition, STDR can function with or without a graphical environment, which allows for experiments to take place even using ssh connections.
STDR Simulator is created in a way that makes it totally ROS compliant. Every robot and sensor emits a ROS transformation (tf) and all the measurements are published in ROS topics. In that way, STDR uses all ROS advantages, aiming at easy usage with the world's most state-of-the-art robotic framework. The ROS compliance also suggests that the Graphical User Interface and the STDR Server can be executed in different machines, as well as that STDR can work together with ROS Rviz!
We hope that STDR Simulator will be useful to the beginner robotics researcher aiming at comprehending the area, as well as to an advanced roboticist who wants to try his ideas in mapping, navigation or path planning.
STDR Simulator is - of course - open source and can be downloaded from our Github page (https://github.com/stdr-
https://github.com/stdr-
Finally you can find a detailed description of STDR Simulator in our wiki page or our website:
Contact e-mail : stdr.simulator@gmail.com
The development team:
Manos Tsardoulias (administrator/developer), PhD in Electrical Engineering (etsardou [at] gmail [dot] com)
Chris Zalidis (maintainer/developer), Student in Electrical Engineering (Aristotle University of Thessaloniki) (zalidis [at] gmail [dot] com)
Aris Thallas (developer), Student in Electrical Engineering (Aristotle University of Thessaloniki) (aris.thallas [at] gmail [dot] com)