Since its inception, Intermodalics' journey has been an amazing trip in a varied landscape. We're solving problems for high-end industries worldwide and for small businesses in our vicinity. Yet both are depending on extremely reliable robotic solutions. Numerous technologies are part of these solutions: 3D vision and reconstruction, 3D robot simulation and collision checking, real-time robot control, man-safe robotics, fieldbus deployment or large scale communication networks. Solving today's robotic challenges requires a creative and multi-disciplinary approach. This is exactly what we love in a project.
For the first time, this year we have sold out registration for ROSCon!
Due to the capacity limit on the venue at University of Hamburg, we can't accommodate any more registrations. We will *not* have on-site registration this year. If you haven't received an email confirmation of your registration, then we won't be able to admit you to the event.
If you're interested in ROSCon but weren't able to register, you still have options for enjoying the event:
* Thanks to generous sponsorship from Qualcomm, we're live-streaming all the ROSCon talks, free of charge. Closer to the event, a link to the streaming site will be posted here: http://roscon.ros.org/2015/#live-streaming
* As in previous years, we will post videos of the ROSCon talks after the event, free of charge.
* We are maintaining a waiting list, which is being processed as slots open up; if you'd like to be added to that list, send email to roscon-2015-oc@osrfoundation.org.
Thanks for all your support, and we're looking forward to a great ROSCon 2015!
- your ROSCon 2015 Organizing Committee
~~~ Thanks again to our Platinum Sponsors: Canonical / Ubuntu and Fetch Robotics! And our Gold Sponsors: 3D Robotics, Bosch, Clearpath Robotics, GaiTech, Magazino, NVIDIA, Qualcomm, Rethink Robotics, ROBOTIS, Robotnik, ROS-Industrial, Shadow Robot, SICK, and Synapticon! ~~~
Modern factories and warehouses need to be reconfigurable, responsive, and efficient to survive. Designed to address these conditions, OTTO uses the same underlying self-driving technology popularized by the Google self-driving car. The system delivers dynamic and efficient transport in increasingly congested industrial operations. Traditional material handling systems require costly and rigid changes to infrastructure, cannot adapt to a changing environment, and are not safe for collaboration with warehouse personnel. OTTO does not rely on external infrastructure for navigation, making implementation hassle-free and highly scalable. It can transport 3300 lb loads at speeds up to 4.5 mph, while tracking along optimal paths and safely avoiding collisions.
"North American manufacturers are constantly under pressure to find new ways to gain an edge against low-cost offshore competition. Traditional automation is saturating. But what about the more complex tasks too difficult or expensive to automate?" said Matt Rendall, CEO and Co-Founder of Clearpath Robotics. "We created OTTO to reinvent material transport and give North American manufacturers a new edge."
Applications for OTTO include moving pallets in a warehouse or cross-dock, and for kitting or assembly line delivery. OTTO units are currently deployed in five test facilities, the first of which belonging to GE.
thought I would take a moment to update you all on the current status of ROS Gentoo (Woot).
Namely, the location of the overly has moved! It is now located at ros/ros-overlay as opposed to allenh1/ros-overlay. The wiki has been changed to reflect this move.
Also, as a neat side-note, Gazebo is working!
Finally, an ebuild was created for the most recent release of wstool.
As part of a summer hack project at Clearpath Robotics, I've released a ROS package [http://wiki.ros.org/vrpn_client_ros]
wrapping the VRPN client library. This package provides support for
exposing information on VRPN Tracker devices (pose, velocity,
acceleration data) into ROS.
We've tested it in
house with VICON and OptiTrack mocap systems - please keep in mind that
neither system exposes velocity or acceleration data over VRPN. Any
feedback, bug reports, or validation is greatly appreciated!
The MoveIt! webpage has been moved to use github-pages, thanks to help from MoveIt! user Praveen Singh. This makes it easier to maintain (the old webpage setup based on Wordpress was outdated and broken).
As a result of this move, the old MoveIt! wiki no longer exists. We do have a backup of it and can move information over if needed. The documentation in the Wiki was outdated, so please let me know if there's particular parts of the Wiki that should be ported over. A redirect has been added for moveit.ros.org/wiki
the latest release of wstool (1.6 -> 1.9.1) provides some minor improvements I'd like to advertise.
Highlights:
- 'wstool info' provides more information about (git) branches and remote state
- There is a new 'wstool foreach' sub-command that allows to execute
shell scripts inside all or selected repositories (similar to vcstool's
'custom' command)
- manpages and bash/zsh completion scripts are also packaged
- 'wstool set ... --update' updates new / changed repositories
Thanks to Kentaro Wada for the initiative and coding effort.
We have created a ROS package to be able to publish images using a
Basler camera. We have a Basler Dart camera but the package should
work with any of their cameras as all use the same API.
We again have reached another milestone which is the End of Life ROS Hydromedusa. We have reached the final release with 223 updated packages and 15 new packages. Full details are below.
Hydro has had a long history over 877 days with commits on 743 of those days. We had 241 individual contributors submitting 4879 commits which is an average of 5.4 commits per day. There were 1690 packages released and built into debian packages in the hydro rosdistro as well as uncounted packages maintained outside the public release pipeline.
Here's a visualization of the public rosdistro releases for Hydro over the course of it's development cycle:
As we've reached EOL we will begin the process of tearing down the Hydro buildfarm.
Please take a moment and thank anyone you know who has released packages into Hydro. The thousands of releases into the rosdistro are what drives our community and helps create value for everyone.
Thanks to all ROS maintainers who make packages available to the ROS community. The above list of packages was made possible by the work of the following maintainers:
This
driver is based on Parrot's official ARDroneSDK3 [2]. As of this
release, it provides interfaces for piloting the drone, subscribing to
its camera and on-board sensory data as well as tweaking its
configuration.
Happy flying!
Mani Monajjemi
AutonomyLab, Simon Fraser University
PS. Feel free to join the discussion on feature development of this driver (and ardrone_autonomy) here: https://trello.com/b/C6rNl8Ux
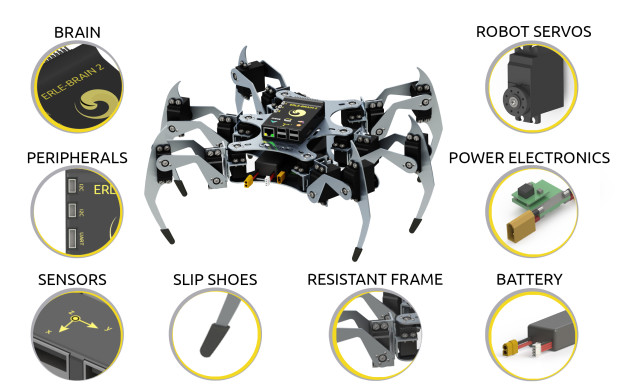
I'm delighted to introduce Erle-Spider as
the first legged drone powered by ROS and running Snappy Ubuntu Core.
This smart robot with a 900 MHz quad-core ARM Cortex-A7 processor runs
Linux natively and embeds several sensors onboard.
The
hexapod has been designed to meet the increasing demand of robot kits
to learn, research and develop while being subject to low levels of
regulation. The drone is also capable of accessing hard-to-reach places
such as pipes and disaster areas, bringing cameras on board and
supporting Wi-Fi, Bluetooth, as well as 3G and 4G networks to provide
connectivity where needed.
Besides
support for ROS, our team has been working with Canonical over last
months to provide access to a cloud-based app store that would allow
anyone to enhance the intelligence of this robot directly by installing
new apps.
Thank you again for coming to the meeting and thanks to the
presenters for making this a fantastic meeting. There were more than 240
people registered and more than 150 who attended from all over the
world. I apologize to those running Ubuntu who had issues joining us
(using Chrome was the suggested solution for the future).
We
are a well-funded stealth robotics startup in Silicon Valley developing
advanced
robotic applications. The members of our team have been creators/prime
architects/developers of some of the most popular open-source software
for
manipulation and robotics including MoveIt!, Rviz, Arm Navigation and
ROS-Control, used by hundreds of researchers, universities and companies
around the world.
We are looking for full-time and intern positions in
motion planning, perception and manipulation starting immediately.
** Motion Planning and Manipulation Engineer (Full-time or Intern) **
Experience: Bachelors, Masters or PhD in Robotics, Computer Science or Equivalent Degree
Must haves:
- Experience writing motion planners/controllers and applying them to real world manipulation problems
- Experience with MoveIt!/OMPL/SBPL/ROS-Control or any other motion planning/manipulation software
- Strong C++ skills with 3 or more years of experience
- Strong system integration skills
Nice to have:
- ROS experience
- Python experience
- Experience working with industrial robots
** Perception Engineer (Full-time or Intern) **
Experience: Bachelors, Masters or PhD in Robotics, Computer Science or Equivalent Degree
- Experience developing state of the art algorithms with PCL and/or OpenCV
- Strong C++ skills with 3 or more years of experience
Nice to have:
- Experience integrating motion planning, perception and control for manipulation
- ROS experience
- Python experience
- GPU based development
** Robotics Software Engineer/Architect(Full-time or Intern) **
We are looking for people who have been key developers/architects of a robotics or other software package. Experience: Bachelors, Masters or PhD in Robotics, Computer Science or Equivalent Degree
Must haves:
- Experience architecting complex robotics or other software infrastructure (3+ years)
- Extremely strong C++ skills
- Extremely strong Linux skills
- Experience with build and distribution systems
Nice to have:
- ROS Experience
- MoveIt! Experience
You
will get to work with one of the best teams in manipulation in the
world developing revolutionary robotic applications. All candidates must be willing to move to the SF Bay Area.
If
you are interested in any of these positions, please email a resume
including a link to robotics or other projects you have worked on and a
link to publicly available code that you have written to robot.moveit@gmail.com. We do not work with recruiters.
We would like to announce that TurtleBot got major(and minor) updates in both software and hardware. These updates are final (apart from bugfixes) and won't change api for indigo.
Turtlebot2 has equipped with better navigation skills, so it can now navigates a lot better with tuned parameters and by Asus Xtion Pro as default sensor.
It supports integrated interaction tools, Remocon & Interactions as new ways to interact with robots.
My name is Rachel Pelayo, and I am a Recruiter at
Southwest Research Institute. I would like to inform the Ros Subscribers
of an amazing opportunity at Southwest Research Institute! Here is a
link to learn more about the Division this opportunity
is in: http://www.swri.org/4org/d10/d10home.htm
If anyone has any questions regarding the job application process, please reach out to me, and I would be happy to help!
You can find the position at our careers webpage, but please see below for information on the position!
Job Summary: Develop hardware/software solutions
(including sensor fusion and control systems) for autonomous/automated
vehicle, mobile robotic, and intelligent vehicle systems; perform in all
phases of the development lifecycle, including
requirements definition, hardware/software/systems design,
implementation, testing, and integration; initiate advanced research and
development programs, interact with clients, and make technical
presentations
Education/Experience: Requires a BS degree in
Electrical, Mechanical, Computer Engineering or Computer Science with at
least a 3.5 GPA. MS or PHD is preferred. MS and PhD candidates must
have done their thesis/dissertation in a research
area pertinent to autonomous/automated vehicles or robotics. Must have a
minimum of one year of related education project work or
internship/co-op experience in autonomous vehicle and/or mobile robotic
systems including, but not limited to, image/sensor processing
for those applications. Must have experience with Linux and various PC
operating systems. Must have excellent interpersonal skills and the
ability to work well individually or as a member of a project team. Must
have excellent written and verbal communication
skills. Must have C++ development experience. ROS experience is
preferred. Must be a US citizen and be able to obtain a DoD Security
Clearance. Occasional travel is required. A valid/clear driver's license
is required
Special Considerations: Applicant selected will be
subject to a government security investigation and must meet eligibility
requirements for access to classified information. Applicant must be a
U.S. citizen
An Equal Employment Opportunity/Affirmative Action Employer
Race/Color/Religion/Sex/Sexual Orientation
Gender Identity/National Origin/Disabled/Veteran
Committed to Diversity in the Workplace
Location: San Antonio, Texas
Southwest
Research Institute (SwRI) offers great opportunities for those who are
seeking exciting, fulfilling careers. Be part of SwRI's more than 60
year
tradition of solving challenging science and technology problems.
Benefits to Working at SwRI
Competitive salaries
Medical, dental, and vision care plans
Ten paid holidays
Retirement plan and benefits
Fitness facilities and trainers
Aerobics classes
Credit union
Dining services
Discount tickets and merchandise
Travel agency
Family picnics and other social activities
The
global aim is to facilitate discussion with our user base. For example,
we're in the process of refactoring our repositories right now to make
for an easier release process and more modular approach. During that
process we'd love to have more feedback from our end users but it is
quite hard for us to reach them. We also think that it'd be a good place
to discuss different uses of our hardware / software, sharing exciting
demos or tutorials, discussing new features, etc.
If
you are using our software (the Shadow hand simulation or real
Hardware, the Cyberglove package, etc...), I hope you'll be joining that
list!
I'm glad to announce the ROS integration of the SP1 stereo vision system
by Nerian Vision Technologies. The SP1 provides real-time 3D data
through the use of a stereo camera and a powerful FPGA. In ROS, this
data can be published as a point cloud or as a disparity map.
Locus Robotics (locusrobotics.com) is looking for a talented software engineer/roboticist to help bring the next generation of warehousing robots to market. Locus is a Boston area stealth-mode startup working with partners in the warehousing market to build a product that is performant and flexible to meet the dynamic needs of our customers.
Our ideal candidate has significant experience with navigation and planning in a multi-robot context, and is familiar with ROS and the ROS navigation stack. Additionally, strong candidates will be comfortable with significant autonomy and self-organized. We're looking for candidates interested in full time employment or consulting work, local or remote. If interested, please send a resume (and if applicable, Github link, portfolio, etc.) to careers@locusrobotics.com. We look forward to hearing from you.
From that page, an important caveat:
~~~
As the "alpha" qualifier suggests, this release of ROS 2 is far from
complete. You should not expect to switch from ROS 1 to ROS 2, nor
should you expect to build a new robot control system with ROS 2.
Rather, you should expect to try out some demos, explore the code, and
perhaps write your own demos.
~~~