





 This morning OpenNI was launched, complete with open source drivers for the PrimeSense sensor. We are happy to now announce that we have completed our first integrate with OpenNI, which will enable users to get point cloud data from a PrimeSense device into ROS. We have also enabled support for the Kinect sensor with OpenNI.
This morning OpenNI was launched, complete with open source drivers for the PrimeSense sensor. We are happy to now announce that we have completed our first integrate with OpenNI, which will enable users to get point cloud data from a PrimeSense device into ROS. We have also enabled support for the Kinect sensor with OpenNI.
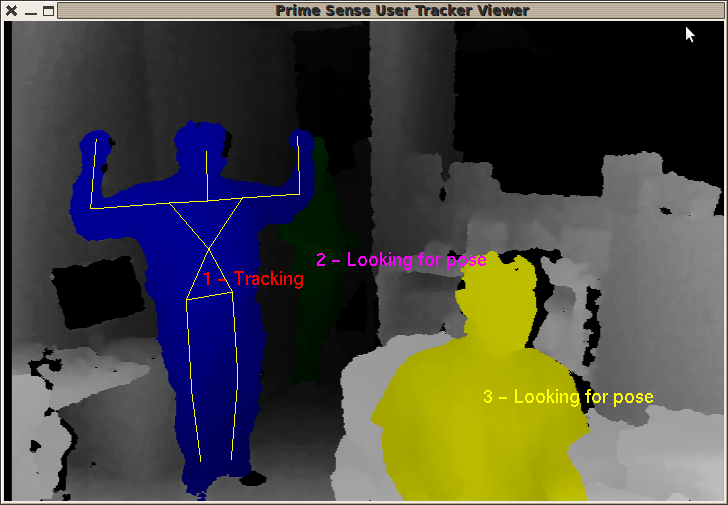
This new code is available in the ni stack. We have low-level, preliminary integration of the NITE skeleton and hand-point gesture library. In the coming days we hope to have the data accessible in ROS as well.
For more information, please see ros.org/wiki/ni.
Leave a comment