





Announcement from Mark Moll to robotics-worldwide
Dear colleagues,
The Kavraki Lab is pleased to announce the initial release of the Open Motion Planning Library (OMPL). OMPL is a lightweight, thread-safe, easy to use, and extensible library for sampling-based motion planning. The code is written in C++, includes Python bindings and is released under the BSD license.
Here are some of OMPL's features:
- Implementations of many state-of-the-art sampling-based motion planning algorithms. For purely geometric planning, there are implementations of KPIECE, SBL, RRT, RRT Connect, EST, PRM, Lazy RRT, and others. For planning with differential constraints there are implementations of KPIECE and RRT. Addition of new planners poses very few constraints on the added code.
- A flexible mechanism for constructing arbitrarily complex configuration spaces and control spaces from simpler ones.
- A general method of defining goals: as states, as regions in configuration space, or implicitly.
- Various sampling strategies and an easy way to add other ones.
- Automatic selection of reasonable default parameters. Performance can be improved by tuning parameters, but solutions can be obtained without setting any parameters.
- Support for planning with the Open Dynamics Engine, a popular physics simulator.
- Tools for systematic, large-scale benchmarking.
OMPL is available at http://ompl.kavrakilab.org.
OMPL is also integrated in ROS and will be available as a ROS package (see http://www.ros.org/wiki/ompl/unstable for documentation and download instructions). It will be fully integrated with the next major release of ROS (D-Turtle), which is scheduled for release in early 2011.
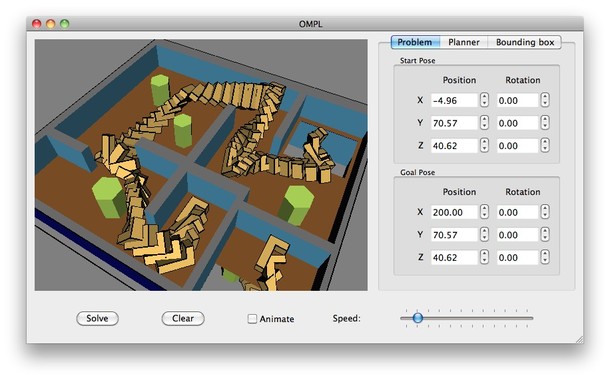
On top of the OMPL library, we have developed OMPL.app: a GUI for rigid body motion planning that allows users to load a variety of mesh formats that define a robot and its environment, define start and goal states, and play around with different planners. The OMPL.app code also comes with concrete command-line examples of motion planning in SE(2) and SE(3) (with and without differential constraints), using ODE for physics simulation, PQP for collision checking, and Assimp for reading meshes. OMPL.app is distributed under the Rice University software license (essentially, free for non-commercial use).
The Kavraki lab is fully committed to further developing OMPL for research and educational purposes. Please check out http://ompl.kavrakilab.org/education.html and contact us if you are interested in using OMPL in your class.
This project is supported in part by NSF CCLI grant #0920721 and a generous gift by Willow Garage.
Ed: here's a video from a year and a half ago showing some of Ioan Sucan's work with OMPL and the PR2
Leave a comment