





Albert II is famous for being the first monkey in space, in June 1949. Laika is equally renowned for being the first animal to orbit the Earth, in 1957. On Sunday, March 16th, at 4:41am (unless inclement weather intervenes), ROS will celebrate its own celestial milestone when it is launched into space aboard a SpaceX rocket as part of a resupply mission to the International Space Station (ISS).


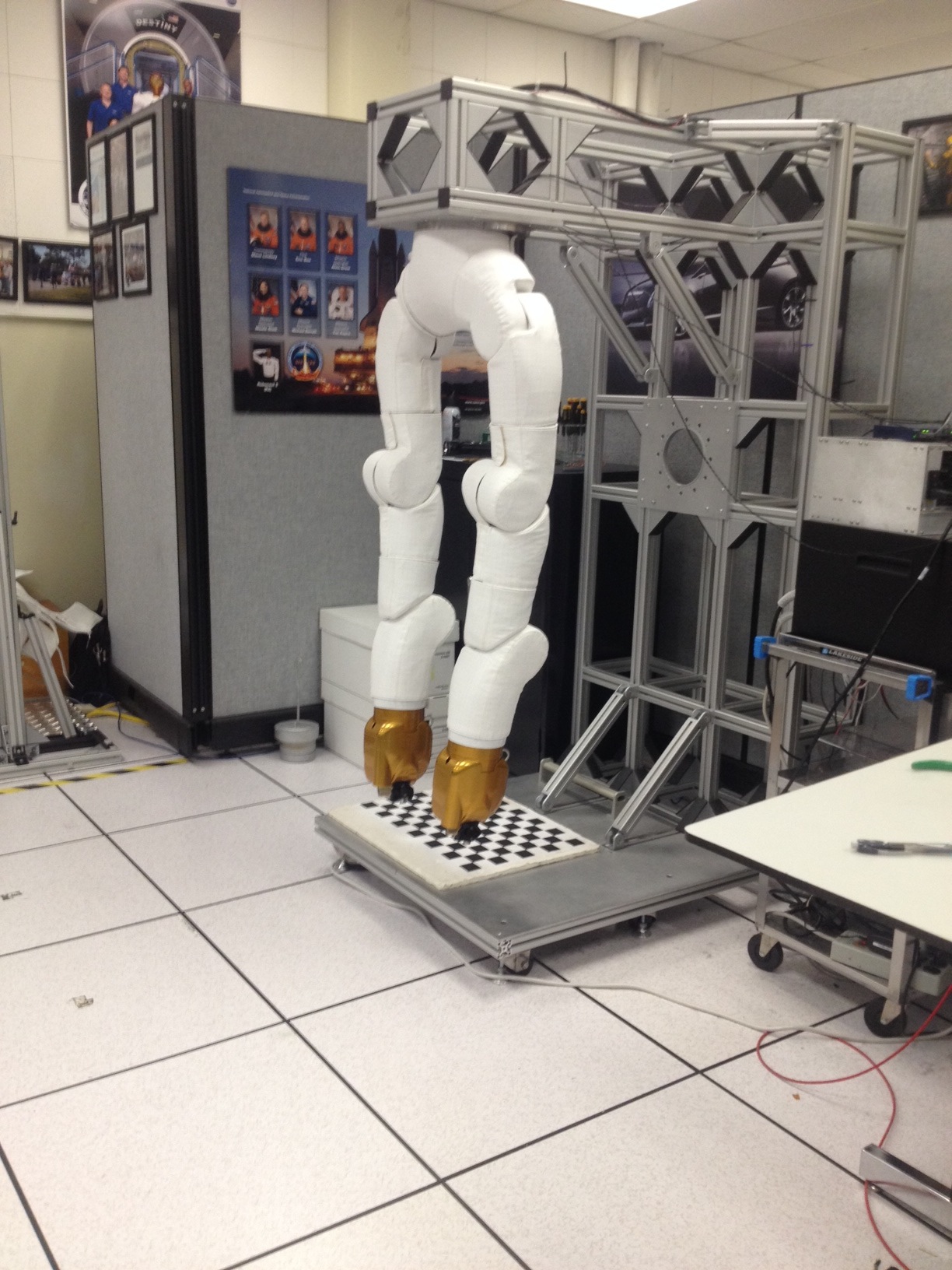
In conjunction with NASA's Robot Rocket Rally March 14-16 at the Kennedy Space Center in Florida, SpaceX's third mission will include a set of robotic legs for the Robonaut 2 (R2) humanoid torso that is currently aboard the ISS. Once those legs are attached to R2, ROS will officially be running in space.
For the last few years, the NASA/GM team at the Johnson Space Center has been using ROS for R2 development here on Earth. We first heard about that at ROSCon 2012 in Stephen Hart's keynote presentation, where he described how they combine ROS and OROCOS RTT to achieve flexible, real-time control of R2. Following the launch this weekend, that open source software will be running on the R2 that's on ISS.
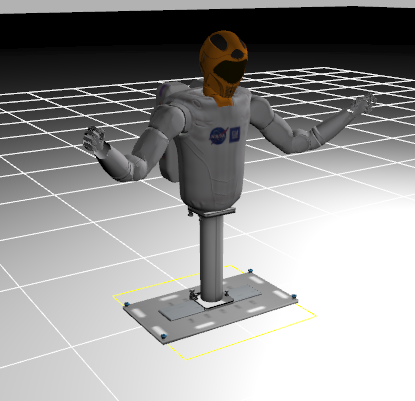
The R2 team also uses the open source Gazebo simulator to simulate R2 when they're doing development and testing. They've released their models of R2 and ISS as open source for the community to work with. We recently integrated those models into an immersive teleoperation Gazebo demonstration that we'll be running at the Robot Rocket Rally this weekend. Drop by our booth and find out what it's like to "be" Robonaut 2!
ROS has already powered robots in the air, on the ground, on and under the water, and on every continent, but we at OSRF couldn't be more excited about ROS journeying to outer space.
Leave a comment