





From Patrick Beeson via ros-users@
More details:
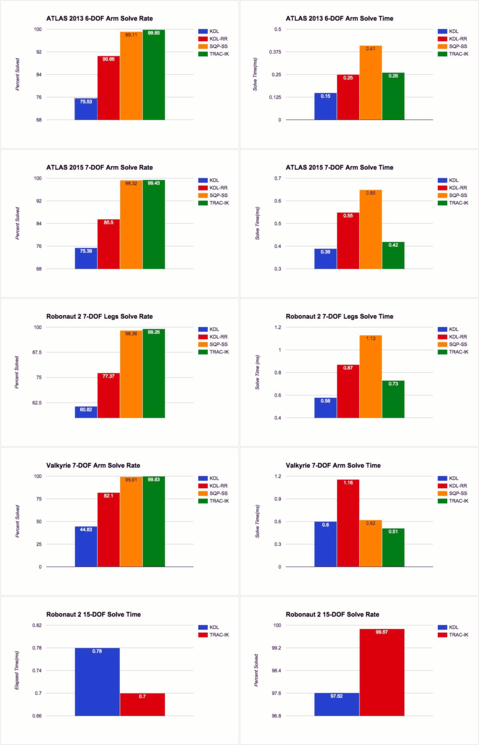
KDL's joint-limited pseudoinverse Jacobian implementation is the solver used by various ROS packages and MoveIt! for generic manipulation chains. In our research with Atlas humanoids in the DARPA Robotics Challenge and with NASA's Robotnaut-2 and Valkyrie humanoids, TRACLabs researchers experienced a high amount of solve errors when using KDL's inverse kinematics functions on robotic arms. We tracked the issues down to the fact that theoretically-sound Newton methods fail in the face of joint limits. As such, we have created TRAC-IK that concurrently runs two different IK methods: 1) an enhancment of KDL's solver (which detects and mitigates local minima that can occur when joint limits are encountered during gradient descent) and 2) a Sequential Quadratic Programming IK formulation that uses quasi-Newton methods that are known to better handle non-smooth search spaces. The results have been very positive. By combing the two approaches together, TRAC-IK outperforms both standalone IK methods with no additional overhead in runtime for small chains, and significant improvements in time for large chains.
TRACLabs Inc. is glad to announce the public release of our Inverse Kinematics solver TRAC-IK. TRAC-IK is a faster, significantly more reliable drop-in replacement for KDL's pseudoinverse Jacobian solver.
Source (including a MoveIt! plugin) can be found at:
https://bitbucket.org/traclabs/trac_ik.git
Source (including a MoveIt! plugin) can be found at:
https://bitbucket.org/
TRAC-IK has a very similar API to KDL's IK solver calls, except that the user passes a maximum time instead of a maximum number of search iterations. Additionally, TRAC-IK allows for error tolerances to be set independently for each Cartesian dimension (x,y,z,roll,pitch.yaw).
KDL's joint-limited pseudoinverse Jacobian implementation is the solver used by various ROS packages and MoveIt! for generic manipulation chains. In our research with Atlas humanoids in the DARPA Robotics Challenge and with NASA's Robotnaut-2 and Valkyrie humanoids, TRACLabs researchers experienced a high amount of solve errors when using KDL's inverse kinematics functions on robotic arms. We tracked the issues down to the fact that theoretically-sound Newton methods fail in the face of joint limits. As such, we have created TRAC-IK that concurrently runs two different IK methods: 1) an enhancment of KDL's solver (which detects and mitigates local minima that can occur when joint limits are encountered during gradient descent) and 2) a Sequential Quadratic Programming IK formulation that uses quasi-Newton methods that are known to better handle non-smooth search spaces. The results have been very positive. By combing the two approaches together, TRAC-IK outperforms both standalone IK methods with no additional overhead in runtime for small chains, and significant improvements in time for large chains.
Details can be found here in our Humanoids 2015 paper here:
https://personal.traclabs.com/~pbeeson/publications/b2hd-Beeson-humanoids-15.html
https://personal.traclabs.com/
A few high-level results are shown in the attached (low-res) figure.
Leave a comment