Thanks again to our Founding/Platinum sponsors: Clearpath Robotics, Heartland Robotics, Willow Garage, Bosch, and Yaskawa. Thanks also to our Gold Sponsors, Yujin Robot and CoroWare.
Guest post from Mikkel Rath Pedersen, Department of Mechanical and Manufacturing Engineering, Aalborg University
The autonomous industrial mobile manipulator "Little Helper" has been the focus of
many research activities since the first robot was designed in 2008, at the Department of
Mechanical and Manufacturing Engineering at Aalborg University, Denmark. The focus
has always been on flexible automation, since this is paramount as production companies
experience a shift from mass production to mass customization. An aim is to use existing,
industrial hardware, and incorporating these components into a fully functioning industrial
mobile manipulator.
Since the original design, the robot has been rebuilt several times. At the present time, the
department has two versions of the Little Helper, at the two campuses of the department in
Aalborg and Copenhagen. The two systems use the same hardware, the only differences being
minor in the construction and electrical system.
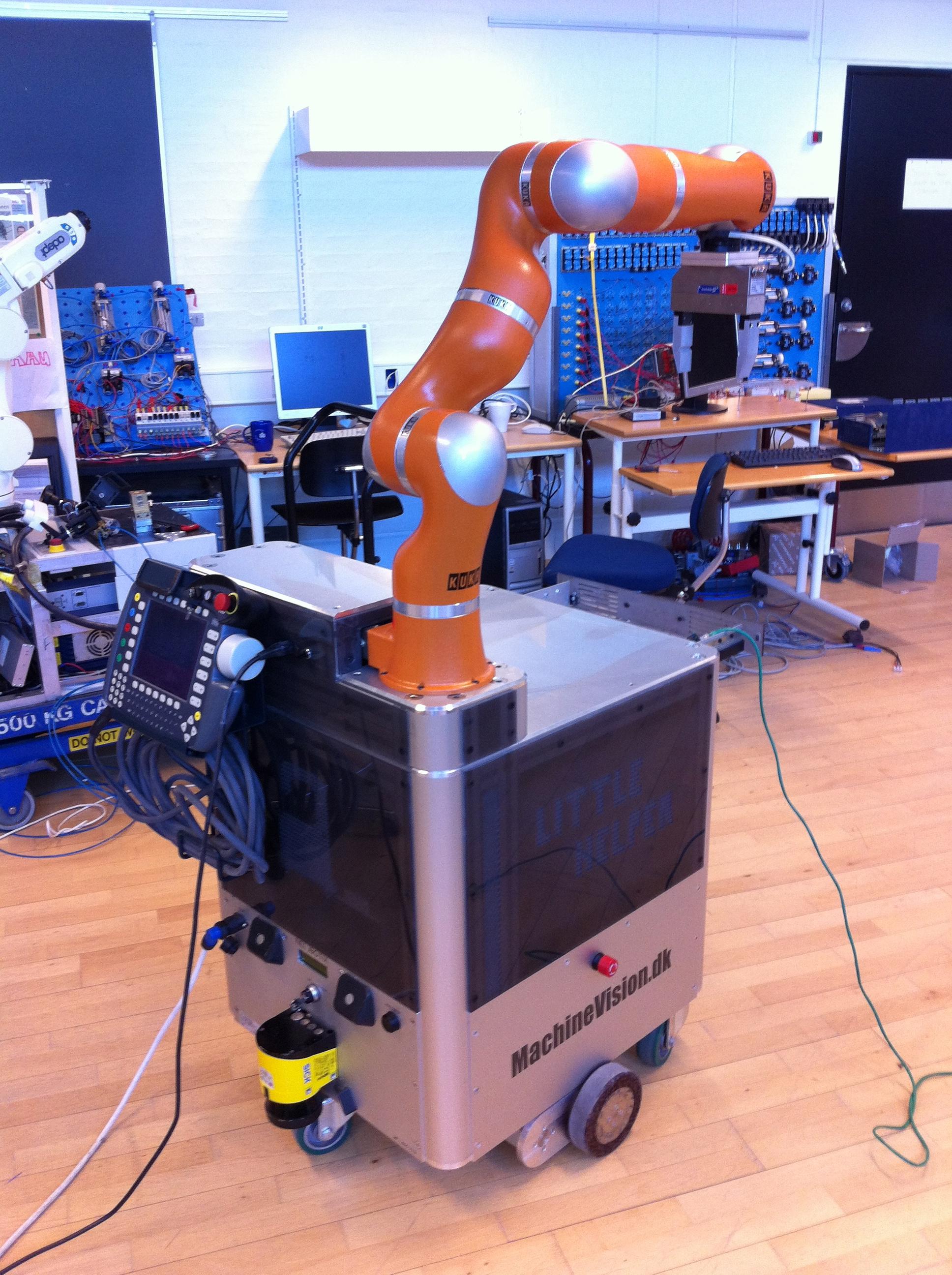
Both systems include the following components:
KUKA Light Weight Robot (LWR) arm (7DOF, integrated torque sensors in each joint)
Neobotix MP-L655 differential drive platform, equipped with
Two SICK S300 Professional laser scanners
Five ultrasonic sensors
Eight 12V batteries, yielding 152 Ah @ 24V total
Schunk WSG-50 electrical parallel gripper
Microsoft Kinect RGBD Camera
Onboard ROS computer (workstation on one, laptop on the other)
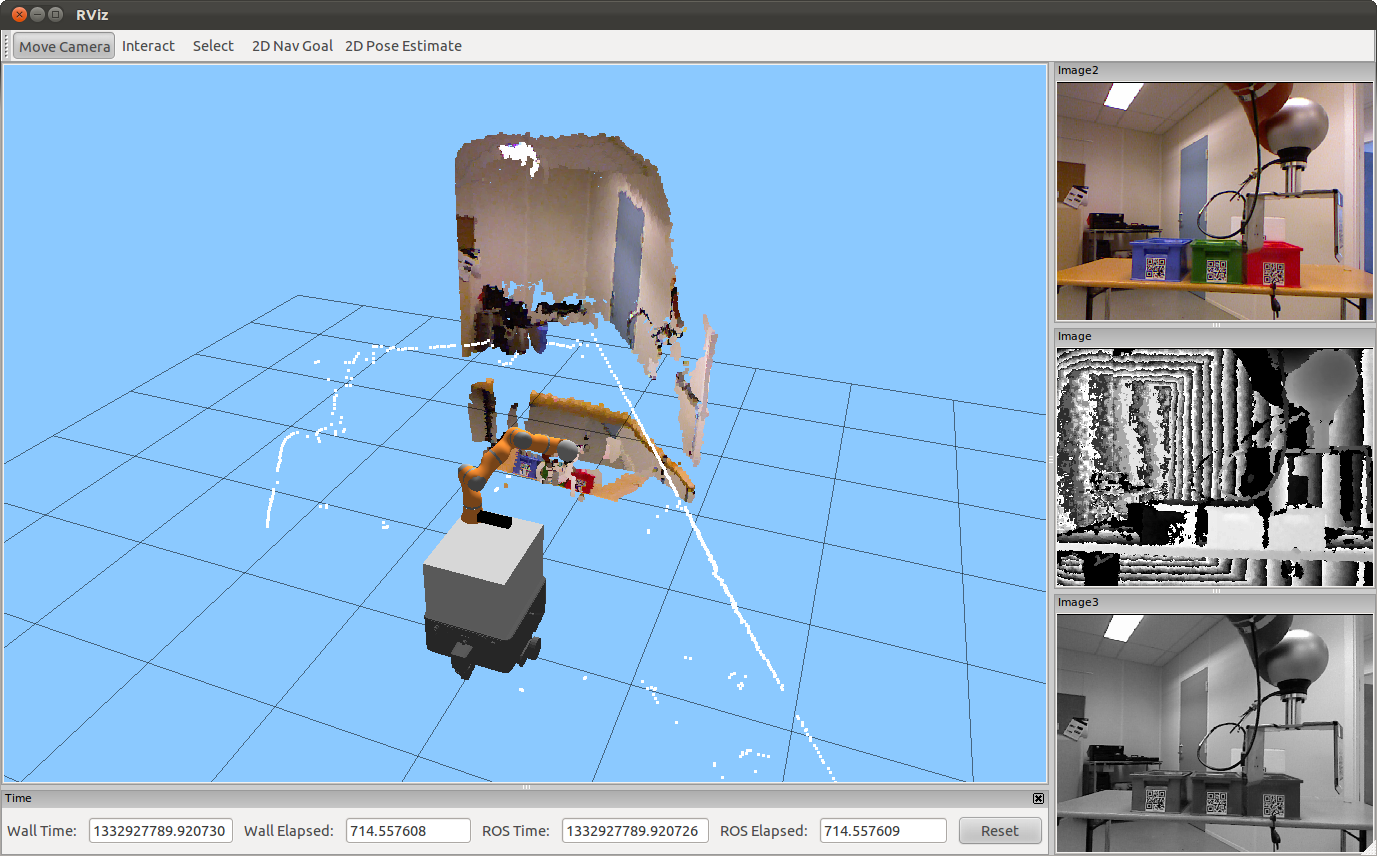
A recent focus has been on the implementation of ROS on the entire system, in order to make
the transition from vendor-specific communication protocols to something more general.
This required the use of some existing packages, that were readily available on the ROS
website, including the stacks for the Kinect camera (openni_camera and openni_tracker),
and the Neobotix stacks (neo_driver, neo_common and neo_apps) that were recently made
available by Neobotix. However, much work has also gone into creating ROS packages for
communicating with the KUKA LWR (through the Fast-Research Interface available with the
robot arm) and the Schunk gripper.
The goal of some current and future research projects are:
modular architectures for mobile manipulators,
task-level programming using robot skills,
gesture-based instruction of mobile manipulators, and
mission planning and control
The Little Helper is involved in the EU-FP7 projects TAPAS and GISA(ECHORD).
Announcement by Stephan Wirth of University of the Balearic Islands to ros-users
Dear ROS users,
I am happy to announce our new public repository for ROS software
developed and/or maintained by the Systems, Robotics, and Vision Group
of the University of the Balearic Islands, Spain.
You can find the top-level rosinstall file here:
The first stack we would like to share with the community is
srv_vision which contains a ROS package for libviso2, a library for
visual odometry (mono and stereo) developed by Andreas Geier from the
Karlsruhe Institute of Technology, Germany.
You can find the package here (or install it using the rosinstall file above):
We are currently participating in two EU-funded projects (aerial &
underwater robotics) , both using ROS. We expect to release more of
our software in the near future and are looking forward to your
feedback.
Announcement from Johannes Meyer and Stefan Kohlbrecher of Team Hector Darmstadt to ros-users
we are happy to announce the hector_quadrotor stack. While impressive results have been demonstrated by different groups using real quadrotor UAVs and ROS in the past, to our knowledge so far there is no solution available for comprehensive simulation of quadrotor UAVs using ROS tools.
We hope to fill this gap with the hector_quadrotor stack. Using the packages provided, a quadrotor UAV can be simulated in gazebo, similar to other mobile robots. This makes it possible to record sensor data (LIDAR, RGB-D, Stereo..) and test planning and control approaches in simulation.
The stack currently contains the following packages:
hector_quadrotor_urdf provides an URDF model of our quadrotor UAV. You can also define your own model and attach our sensors and controllers to it.
hector_quadrotor_gazebo contains launch files for running gazebo and spawning quadrotors.
hector_quadrotor_gazebo_plugins contains two UAV specific plugins: a simple controller that subscribes to a geometry_msgs/Twist topic and calculates the required forces and torques and a sensor plugin that simulates a barometric altimeter. Some more generic sensor plugins not specific to UAVs (IMU, Magnetic, GPS, Sonar) are provided by package hector_gazebo_plugins in the hector_gazebo stack.
hector_quadrotor_teleop contains a node and launch files for controlling the quadrotor using a joystick or gamepad.
hector_quadrotor_demo provides sample launch files that run the quadrotor simulation and hector_slam for indoor and outdoor scenarios.
As many users of real quadrotors can probably confirm, testing with the real thing can lead to broken hardware quickly in case something goes wrong. We hope our stack contributes to a reduction of the number of broken quadrotor UAVs in research labs around the world
We plan to convert the plugins for Gazebo 1.0.0 as soon as ROS fuerte is released.
Two demo videos (one showing a indoor scenario, the other showing a outdoor scenario) are available here:
Announcement from Tully Foote (rosinstall maintainer) to ros-users
Hi Everyone,
Thanks to the work of Thibault Kruse we have released an upgraded version of rosinstall we have bumped it up to the 0.6 series to indicate the significant overhaul. The basic command line usage has not changed.
The following changes have been incorporated:
prevention duplicate sourcing and path appending actions in combination with fuerte
No recursion into rosinstall files other than those provided with the Command line interface (was defunct anyway)
Giving a .rosinstall as a CLI argument is equivalent to giving its folder
elements in rosinstall files are checked to be valid folders (files for setup-file)
Duplicate path detection improved
It is now illegal to have any two SCM entries with overlapping paths
rosinstall will now change relative path "uri"s in rosinstall file SCM elements to absolute paths uris
Python code is now split up into modular design, allowing proper unit testing and using rosinstall code as library
Many more Unit-tests, more code documentation
usage of the yaml structure within the code was wrapped in a Wrapper class
setup.sh now parses .rosinstall to generate ROSPACKAGEPATH
Please register for ROSCon by March 31st if you wish to receive a ROSCon t-shirt. We have updated the registration form to ask for your t-shirt size and will contact anyone who has already registered to get this information as well.
Thanks again to our Founding/Platinum sponsors: Clearpath Robotics, Heartland Robotics, Willow Garage, Bosch, and Yaskawa. Thanks also to our Gold Sponsors, Yujin Robot and CoroWare. Without these contributions, the conference (including the swag) would not be possible.
The goal of our research is the development of a precision approach for minimally invasive hearing aid implantations. Our approach centers around a imaged-guided surgical robot system, capable of drilling a direct tunnel access (diameter 1.2 mm) from the outside of the skull, through the Temporal Bone into the middle ear. The drill trajectory is planned using high-resolution cone beam computer tomography. The deviation between the planned and the actual drill trajectory shall be less then 0.5 mm in order to avoid damaging sensible nerves within the temporal bone.
To achieve such accuracy, our system consists of a specifically developed robotic manipulator with a 5 DOF serial kinematic, guided by an optical tracking system with a tracking accuracy of 20 microns. The robot weights around 5 kg and can thus be mounted directly to an OR table. It comprises a sensitive force-torque sensor in its tool tip and a electromyography (EMG) sensor integrated in the instrument tip. The surgeon controls the system functionalities by means of a graphical user interface and the robot system itself through haptic force feedback.
The robot system together with available patient data is modeled using ROS to observe the robots movements, its sensors and possible collisions in real-time. The model is updated and visualized using Rviz running on a dedicated client computer connected via CAN to the robot control system.
This doesn't do any stereo correspondence, but broadcasts images and allows calibration parameters to be stored. Various parameters can be set within the launch file.
Announcement by Juan Antonio Breña Moral to ros-users
Good night,
my colleague Lawrie Griffiths and me, Juan Antonio Breña Moral, are developing a new software to bind a Lego Mindstorms NXT with ROS using the Open Source Project, LeJOS, A Java Virtual Machine for Lego Mindstorms. LeJOS has a rich API based on Java to build Robots with NXT: http://lejos.sourceforge.net/nxt/nxj/api/
This development is an alternative for the current support for NXT with ROS. The main difference between nxt_ros and nxt_lejos is the technology used to connect with a NXT brick. In this case we use LeJOS with ROSJava working together. Besides, we are testing other projects as JavaCV.
Our ROS development is located in the following URL:







 Please
Please