





From Jesse Scholtes, Eindhoven, the Netherlands
In December 2013, TMC and YASKAWA Benelux set out to make a technology demonstrator.
YASKAWA sees a shift in robotics, from welding, handling, painting to new application areas. Some recent developments of YASKAWA are 'milking-robots' and 'slaughter-robots'. And as we are aware of, Universities and research institutions are working hard on the introduction of robots in (health) care or other areas where human interaction is present and essential.
A new era of smart robotics is becoming a reality. The development of these new robots pose new technological problems and need different solutions. It raises questions about how a robot can be programmed to deal with changing environments? How an intuitive and user-friendly interface can be created? Or how flexible mechanics can be be designed to handle different object just like humans do. And more and foremost how to create smarter safety systems such that robots can safely operate among people.
The demonstrator sets out to do accomplish a number of things:
- Use a 'higher' software environment like ROS
- Integration of vision to make the robot aware of its surroundings;
- Implementation of a flexible gripper to make it possible to perform different tasks;
- Use a modern user interface like a tablet or smartphone to control the robot;
- Make the robot perform some tasks that are expected from service robotics.
After a brainstorm we came up with the idea that the robot should pick, slice and squeeze an orange to make fresh orange juice, next to that it should also serve this glass to someone in the audience.
For 3½ months and with a team of 12 people we shared our Monday evenings and a lot of enthusiasm to build this orange crusher or as we call her nowadays: (Juicy) Lucy. The team consisted of people with different backgrounds: mechatronics, robotics, embedded software, mechanical design and electronics. Our deadline was the High Tech Systems Fair the 7th or 8th of May.
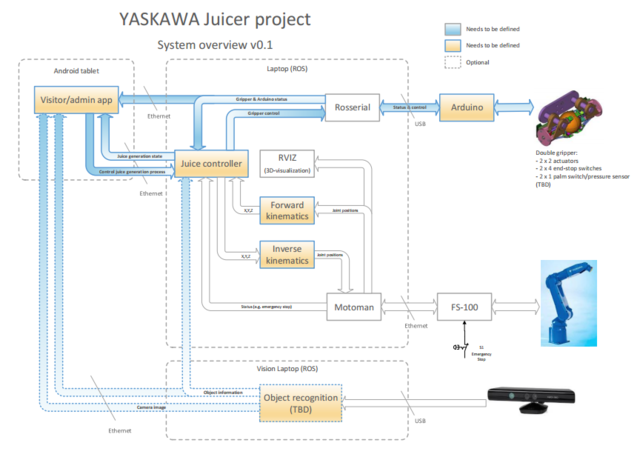
ROS enabled us to quickly prototype and realize our demonstrator. Using ROS we combined several piece of hardware:
An Android tablet where we designed two different apps. A user app to choose the amount of orange juice. And an engineering app that allowed us to control the robot gripper, provided ROS INFO messages plus control over the state machine.
A laptop and a mini pc; where the mini pc was used to perform the image processing.
A webcam, where its images were used to dynamically extract the X, Y coordinates of the oranges.
An Arduino board. Here, the Arduino board was used to control the gripper which was equipped with 4 x stepper motors, 4 end switches and a sonar sensor (the sonar was used to measure the height of the orange).
An example of the system overview can be seen here.
In the end we managed to deliver the first version of our demonstrator that serves as a platform for future enhancements and add more complexity. The fruits of our labor can be viewed in the following video.
Making Juice at the High Tech Systems Fair 2014 from YASK_dem on Vimeo.
At this point the HTS fair is the only fair were we presented our demonstrator. At the moment we are brainstorming on a follow up for the project.
Leave a comment