





From Diego Escudero
Last year we started thinking about using ROS as development framework to make our life easy when we develop our own machine controller, the NJ controller that integrates Robotics functions.
During the initial analysis we defined four use cases and decided to implement one of them. The selected one was the visualizer of parallel robots that will be used during the system testing phase of the controller. The work was done by F. Martí during his winter internship at OMRON Industrial Automation.
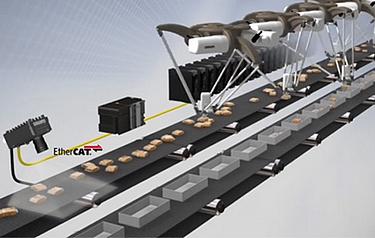
The NJ controller is programmed using the SYSMAC Studio IDE and controls 64 servo-drives through the EtherCAT field bus. Due to that, the visualizer is installed on a normal computer with an EtherCAT slave card; and it runs on Ubuntu 14.04 LTS and ROS Indigo.
The visualizer is composed by two main parts:
- The simulator of EtherCAT slaves.
- The ROS meta-package that visualizes the family of delta robots.
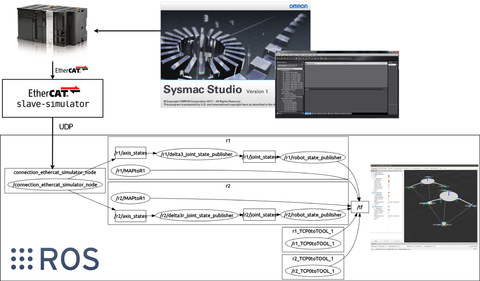
The EtherCAT slave simulator reads the axes commanded positions sent by the controller, forwards them to a ROS node, and closes the loop providing feedback to the controller. After that the ROS meta-package calculates the full positions of the delta robots based on the provided positions and visualizes them using rviz.
In this video below you can see the system working at the Robotics Lab of the Motion Development Team that is placed in Barcelona (Spain).
Visualiser of Delta robots using ROS and EtherCAT from FelipMarti on Vimeo.
Leave a comment