We're now soliciting sponsors for ROSCon 2019 in Macau!
Please check the prospectus to learn about this year's benefit packages. If you're interested in sponsoring or have any questions about the sponsor program, contact the organizing committee.
We hope to see you at ROSCon 2019!
-- Your friendly neighborhood ROSCon 2019 Organizing Committee
Presentations on all topics related to ROS are invited. Examples include: introducing attendees to a ROS package or library, exploring how to use tools, manipulating sensor data, and applications for robots.
Women, members of minority groups, and members of other under-represented groups are encouraged to submit presentation proposals to ROSCon.
Proposals will be reviewed by a program committee that will evaluate fit, impact, and balance.
We cannot offer presentations that are not proposed! If there is a topic on which you would like to present, please propose it. If you have an idea for an important topic that you do not want to present yourself, please post it for discussion at ROS Discourse.
Topic areas
All ROS-related work is invited. Topics of interest include:
Best practices
New packages
Robot-specific development
Robot simulation
Safety and security
Embedded systems
Product development & commercialization
Research and education
Enterprise deployment
Community organization and direction
Testing, quality, and documentation
Robotics competitions and collaborations
Related open source projects
To get an idea of the content and tone of ROSCon, check out the slides and videos from previous years.
Proposal format
A session proposal must include:
Title
Presenter (name and affiliation)
Recommended duration: Short (~10 minutes), Medium (~20 minutes) or Long (~30 minutes)
Summary [maximum 100 words]: to be used in advertising the presentation
Description [maximum 1000 words]: outline, goals (what will the audience learn?), pointers to packages to be discussed
Please be sure to include in your proposal enough information for the program committee to evaluate the importance and impact of your presentation. We strongly encourage you to provide links to publicly available resources, including code repositories and demonstration videos. Demonstrated community interest is helpful in evaluating proposals. A proposal that promises to make an open source release in the future is difficult for the program committee to evaluate and less likely to be accepted.
The ROSCon 2018 organizing committee aims for ROSCon to represent the entire ROS community, which is diverse and global. In addition to promoting technology that is open source, we also strive to ensure that our communities themselves are as open and accessible as possible, since we recognize that diversity benefits the ROS ecosystem as a whole.
Whoever you are, whatever you do, and wherever you do it, if you're interested in ROS, then we want you to join us at ROSCon. To help reduce the financial barriers to conference attendance, the ROSCon organizing committee is offering a number of scholarships to members of traditionally underrepresented groups in the tech community. Thanks to the support of the program's sponsors, these scholarships each include a complimentary conference registration pass and three nights' accommodation shared with another recipient[1]. Limited travel support is available for participants whose travel to the conference would otherwise be infeasible[2]. Please note that all other expenses (including any visa requirements) will be the responsibility of the participant.
[1] To maximize the impact of the scholarship funds, scholarship recipients will be asked to share a room with another recipient. Under special circumstances alternative arrangements can be accommodated.
[2] Participants will be responsible for covering their travel expenses up-front, as the travel support will be provided at the conference.
Eligibility
We invite applications from members of groups that have been traditionally underrepresented in the robotics community (including but not limited to: women, LGBTQ+, people of color, people with disabilities, people from racial and/or ethnic minorities in the robotics community, and people from developing nations), who may not otherwise be able to attend ROSCon.
Previous ROSCon Diversity Scholarship recipients are not eligible to re-apply, but we are proud to share this feedback from a participant of the 2017 Diversity Program:
The ROSCon Diversity Scholarship Program provided me with an opportunity that would have been completely impossible without it. I was able to attend my first robotics conference and feel empowered to keep working to try and make a positive impact on this community. Also, it was very encouraging to see so many companies stepping up to promote and enable diversity within their companies and the robotics community. Thank you!
Sponsors
The ROSCon 2018 Diversity Program is made possible with support from the following sponsors:
If your organization is interested in getting involved in the Diversity Program, please get in contact.
How to Apply
To apply, fill out this form by May 6 2018, describing how you are involved with ROS and the robotics community and what you hope to get out of attending ROSCon. Scholarships will be awarded based on a combination of need and impact. Every applicant will be notified of the outcome of their application.
For more information about ROSCon 2018, including the program, code of conduct, and childcare options, please see http://roscon.ros.org/2018
Thank you to the conference Platinum Sponsor, Erle, and to our Gold Sponsors: Amazon, Clearpath, Fetch Robotics, Google, Locus, ROBOTIS, Tier IV, Universal Robots.
Bronze: The Construct, MathWorks, Northwestern MS in Robotics Program, Piaggio Fast Forward, Yujin Robot
Friend: Blue River, Bosch, Magna
In addition Erle and Locus are both also supporting the Diversity Program.
We're still looking for new sponsors. Please check the prospectus to learn about our sponsorship opportunities and feel free to contact the organizing committee (roscon-2018-oc@osrfoundation.org) with any questions. The exclusive sponsorship levels are starting to sell out, so it's best to act soon.
We're excited to announce that this year's World MoveIt! Day will be Wednesday October 18th! The event is a day long international hackathon to improve the MoveIt! code base, documentation, and community. We hope to close as many pull requests and issues as possible and explore new areas of features and improvements for the now five year old framework.
We will be having many event locations including:
Verb Surgical, San Francisco Bay Area
Magazino, Munich, Germany
Southwest Research Institute, San Antonio, USA
Xamla Robotics (PROVISIO GmbH), Münster, Germany
ROS-Industrial Asian Pacific Consortium, Singapore (THURSDAY OCTOBER 19th)
PickNik Robotics (Univ. Colorado), Boulder, USA
Shadow Robot Company, London, UK
You are encouraged to have your own event in your lab/organization/company and video conference in to all the other events.
After a gorgeous and enlightening couple of days in Vancouver, we bid farewell to ROSCon 2017. We sold out ROSCon for the third year in a row, with over 475 attendees.
Thanks to everyone for coming and for your support! And thank you to our record-breaking 33 sponsors for the financial support that enabled the conference to grow!
We're posting the slides as they come in from the speakers and we expect to have the videos posted by October 6th. As usual, all of that material is linked in the program.
The ROSCon registration rates increase next Tuesday, August 1st! Register now at: https://roscon2017.eventbrite.com/ to get the early registration discount.
We're anticipating another record year with more proposals, talks, and sponsors than ever before!
The results are in, and the ROSCon 2017 program has been posted!
This year saw a record response from the community, with 107 proposals submitted. Following discussion and tough decision-making among the Program Committee, we decided to accept 38 proposals for presentation (35.5% acceptance rate).
In recent years we made room in the program for 20-25 presentations, in a mixture of long (~40-minute) and medium (~20-minute) durations. This year, given the large number of high-quality proposals that were submitted, we're trying something new, which is to add a category for short presentations, at 5 minutes each. These slots will allow the presenters to briefly introduce their work and entice the audience to follow up in person to learn more.
To encourage those in-person interactions, we're adding another new feature this year, which is a poster session wherein attendees can find and discuss with the presenters the work that most piqued their interest. The poster session will be held at the end of the first day, during the first half of the reception.
In exchange for these additions to the program, this year we will not be holding the customary birds of a feather (BoF) sessions. While those ad hoc meetings were fun and lively in the early years, as the conference has grown it has become harder to keep them useful to a broad audience, and we've seen participation dropping in recent years. As always, we're experimenting to find the best program mix for the community, and we look forward to getting your feedback on this year's lineup.
We hope to see you in Vancouver for ROSCon in September! As a reminder, the deadline for early registration is August 1. Register today.
-- Your friendly neighborhood ROSCon 2017 Organizing Committee
Thank you to our Platinum Sponsor: Intel!
Thank you to our Gold Sponsors: Clearpath, Erle, Fetch, Gaitech, Locus, and Rapyuta!
Presentations on all topics related to ROS are invited. Examples include introducing attendees to a ROS package or library, exploring how to use tools, manipulating sensor data, and applications for robots.
Women, members of minority groups, and members of other under-represented groups are encouraged to submit presentation proposals to ROSCon.
Proposals will be reviewed by a program committee that will evaluate fit, impact, and balance.
We cannot offer presentations that are not proposed! If there is a topic on which you would like to present, please propose it. If you have an idea for an important topic that you do not want to present yourself, please post it for discussion at ROS Discourse.
Topic areas
All ROS-related work is invited. Topics of interest include:
Best practices
New packages
Robot-specific development
Robot simulation
Safety and security
Embedded systems
Product development & commercialization
Research and education
Enterprise deployment
Community organization and direction
Testing, quality, and documentation
Robotics competitions and collaborations
To get an idea of the content and tone of ROSCon, check out the slides and videos from last year.
Proposal format
A session proposal must include:
Title
Presenter (name and affiliation)
Recommended duration: Short (~20 minutes) or Long (~40 minutes)
Summary [maximum 100 words]: to be used in advertising the presentation
Description [maximum 1000 words]: outline, goals (what will the audience learn?), pointers to packages to be discussed
Please be sure to include in your proposal enough information for the program committee to evaluate the importance and impact of your presentation. Links to publicly available resources, including code repositories and demonstration videos, are especially helpful.
After 6 successful ROS Summer Schools we are offering another one this year at our University of Applied Sciences in Aachen (Germany). The event is planned from 14th August till 25th August 2017. Everyone who is interested in learning ROS is invited to register now! A limited funding for International students for this event is offered by the DAAD.
In the two weeks we are handling the following topics of mobile robotics more in detail:
ROS Basics, Communication, Hardware Interfacing, Teleoperation, Transforms, Gazebo Simulation, Landmark Detection, Localization, Mapping, Navigation, Control, some Industrial exhibition and so on and so on. . . Of course all these topics can be experienced on real hardware using our mobile robots after learning the theory.
And if this is still not enough for you, we offer an additional ROS UAV weekend afterwards from 26th to 27th of August. This will include assembling UAVs, first flight setup, flight modes, ROS interfacing, Landmark Detection and getting in touch with autonomous flying. Feel free to choose this option in our application form. Application form, more information, photos and videos can be found on our homepage:
All is organized by MASCOR. The ROS Summer School is designed to teach participants about how to get started with ROS; it is created for those who have had an interest in autonomous systems, but didn't quite know how to get started. With that, organizers recommend students have a basic knowledge of Linux (Ubuntu) and one programming language such as Python or C++. The two-week program is made possible through Mobile Autonomous Systems and Cognitive Robotics (MASCOR).
The first Ukrainian ROS Meetup will be held Tuesday March 21st 2017 18:30.
Find us at:
Lohika company
(2-nd floor - Conference hall)
15 Lemkivska street
Lviv
Ukraine
The first ROS meeting in Ukraine is organised to begin an evolution of ROS Ukraine community.
Both ROS enthusiasts and those beginning their journey into ROS are welcome.
To kick-start the meeting Andriy Petlovanyy from Shadow Robot Company will share some insights into the way they use ROS in their applications.
Participation is free, just please register here
We are pleased to announce the 2nd edition the international summer course RobotCraft 2017: Robotics Craftsmanship International Academy, from 3rd of July until 3rd September, in Coimbra, Portugal. Besides providing a general overview of the science and art behind robotics and teaching the basis, the course have a strong component of ROS, starting from the integration of the developed mobile robot during the course, to the high level AI routines implementation in ROS.
we hosted 65 students coming from all over the world, from different nationalities, with distinct formation fields and degrees, from BSc to PhD students.
Concepts and theorems for the introduction to robotics, describing the history of robotics and its evolution;
Understand the potential use of ROS framework;
Integration of the developed mobile robot in ROS;
Development of multi-robots and AI algorithms in ROS;
Acquire C/C++ programming skills;
Acquire basic 3D modelling and printing concepts, applied in the design of robotic platforms;
Acquire basic electromechanical concepts, applied in the development of robotic platforms;
Understand the potential use of Atmel microcontrollers, using the Arduino platform;
Understand the use of sensors (e.g., range finders, encoders, cameras) and actuators (e.g., servo motors, stepper motors, DC motors) used in robotics;
Explore and apply the concepts of networks and different communications architectures to robotics;
Explore and apply concepts of artificial intelligence in robotics;
Consolidate concepts learned during the modules for the full design of a mobile robotic platform, including 3D design, electromechanical assembly, low-level and high-level programming, and artificial intelligence.
We're happy to announce that ROSCon 2017 will be held September 21-22, 2017 at the Vancouver Convention Centre in Vancouver, Canada. IROS 2017 will be held at the same venue September 24-28, so plan to attend both of these great events!
More details will be forthcoming. In the mean time you can get more information about ROSCon by reviewing past ROSCon events 2016, 2015, 2014, 2013, or 2012. Where you can find the past presentations listed and most include both slides and video recordings.
ROSCon was record-breaking in every way, with over 450 attendees and a 60% increase over last year in sponsorship.
Thanks to everyone for coming and for your support! And thank you to our sponsors for the financial support that enabled the conference to grow!
We're happy to announce that we've posted recordings of all the talks on the program. You can find them linked at: http://roscon.ros.org/2016/#program As well we have collected the slides from most of the presenters as well which are linked there as well.
If you would like to browse through the videos alone you can also find all 56 videos here: https://vimeopro.com/osrfoundation/roscon-2016
Our second MoveIt! community meeting webcast will be on October 27th at 8am Pacific to discuss the latest developments and uses of MoveIt! around the world. Join us online to hear from research groups and industry on their perspectives of motion planning in ROS. Confirmed speakers include:
Recent Developments in MoveIt! - Dave Coleman
The Search-Based Planning Library (SBPL) - Dr. Maxim Likhachev and Andrew Dornbush
Updates from the Flexible Collision Checking Library (FCL) - Dr. Dinesh Manocha
Q&A with original MoveIt! Developer & Founder - Dr. Ioan Sucan
Final agenda and details on how to join the AnyMeeting webcast will be sent out closer to the event. If you are interested in presenting your work to the community please contact me by October 21st.
The Barcelona ROS (Robot Operating System) Summer Course will start in 2
weeks. This is the final call.
ABOUT THE EVENT
A single week of basic ROS learning in Barcelona. These courses are
available for students and teachers with no previous knowledge of ROS. 100%
practical since minute one.
Dates: 5th to 10th of September
Morning (from 9:30 to 13:30): teaching by doing exercises. Teaching is
100% practical. Students must complete several exercises along with the
teachers' explanations of different subjects.
Afternoon (from 14:30 to 16:30): working on a ROS project. Students are
presented with a project they have to solve by the end of the week working
by themselves in the afternoons, with the support of the teachers.
Exam and ROS Certification: There will be a test at the end of the
course. Those who pass the test with at least 8 out of 10 will receive a
ROS certification.
Spots Still Available: due to the high demand of the course, we increased
the number of seats to 13. There only remain 3 free spots.
Location: Gran Via de les Corts Catalanes, 608, 3ºD, 08007 Barcelona,
SPAIN
TIME TABLE
Monday: ROS BASICS: basic structure of ROS programs and its concepts
Tuesday: ROS TOPICS: how to create topics and how to access them
Wednesday: ROS SERVICES: how to create services and how to use them
Thursday: ROS ACTIONS: how to create action servers and use them
Friday: ROS DEBUG: ROS tools that allow to find errors and debug
The 2nd ROS Summer School in China was held on 22-28 July 2016 at Shanghai. It attracted over 400 participants. This event was organized by Intelligent Robot Motion and Vision Laboratory (directed by Dr. ZHANG Xinyu, http://www.robotics.sei.ecnu.edu.cn) and sponsored by Graduate School of East China Normal University.
This summer school includes 4 keynote speeches given by senior academic researchers, 7 invited talks delivered by the industrial representatives and 13 lectures given by ROS experts. Students from 75 universities and institutes, and developers from 64 industrial companies participate this seven-day event. During the summer school, a 3km running activity as arranged every early morning to promote a closer community of learners.
More details about this and previous events available at:
Join us for an international hackathon to improve the MoveIt! code base, documentation, and community. Following the heels of the repo merge, we hope to fix all broken links in the documentation, close as many longstanding pull requests and issues as possible, and have some fun with a newly released integrated simulation of MoveIt! manipulation + Gazebo + Fetch for us to test. An hour long Q&A session is scheduled at 9am Pacific to allow the community to meet the people merging their pull requests.
We will be having several event locations including:
Fetch Robotics in San Jose, California. Contact: Michael Ferguson
ROS Industrial at Southwest Research Institute in San Antonio, Texas. Contact: Paul Hvass
Xamla Robotics Team at Provisio GmbH in Münster, Germany. Contact: Andreas Köpf
JSK at the University of Tokyo in Tokyo, Japan. Contact: Kei Okada
If you aren't near an organized event we encourage you to have your own event in your lab/organization/company and video conference in to all the other events. We would also like to mail your team or event some MoveIt! stickers to schwag out your robots with.
To save money, remember to book your hotel room soon as well. The Conference has reserved a limited block of rooms at a discounted rate which is available until September 1st or until the block is full. To get the reserved rooms at the discounted rate book through this link More information is available at: http://roscon.ros.org/2016/#location.
For more information about ROSCon including the program and information on the location please visit: http://roscon.ros.org/
We can't put on ROSCon without the support of our generous sponsors, who now include Canonical, Dorabot, Nvidia, and SICK.
We'd like to especially thank our Platinum and Gold Sponsors: Fetch Robotics, Clearpath Robotics, Intel, Nvidia, ROBOTIS, ROS-Industrial Consortium / Southwest Research Institute, SICK, and Yujin Robot.
The ROSCon 2016 organizing committee aims for ROSCon to represent the entire ROS community, which is diverse and global. In addition to promoting technology that is open source, we also strive to ensure that our communities themselves are as open and accessible as possible, since we recognize that diversity benefits the ROS ecosystem as a whole.
Whoever you are, whatever you do, and wherever you do it, if you're interested in ROS, then we want you to join us at ROSCon. To help reduce the financial barriers to conference attendance, the ROSCon organizing committee is offering a number of scholarships to members of traditionally underrepresented groups in the tech community. These scholarships will include a complimentary conference registration pass and two nights' twin-share* accommodation. Please note that all other expenses (including travel and any visa requirements) will be the responsibility of the participant.
*To maximize the impact of the scholarship funds, scholarship recipients will be asked to share a room with another recipient.
Eligibility
We invite applications from members of groups that have been traditionally underrepresented in the tech community (including but not limited to: women, LGBTQ+, people of color, people with disabilities, and people from ethnic minorities in their country of residence), who may not otherwise be able to attend ROSCon.
How to apply
To apply, please fill out this form by the 14th of August, describing how you are involved with ROS and the robotics community and what you hope to get out of attending ROSCon 2016. Scholarships will be awarded based on a combination of need and impact. Every applicant will be notified of the outcome of their application by the 20th of August.
For more information about ROSCon 2016, including the program, code of conduct, and childcare options, please see http://roscon.ros.org/2016/
We're happy to announce that the program for ROSCon 2016 has been published. You can see the lineup of accepted presentations here:
http://roscon.ros.org/2016/#program
By popular demand, the ROSCon lightning talks and birds of a feather discussions will be returning! Lightning talks and BOF topics are scheduled just-in-time at the conference.
ROSCon is happening in Seoul immediately prior to IROS, which will be held in nearby Daejeon: http://iros2016.org/.
We can't put on ROSCon without the support of our generous sponsors, who now include Locus Robotics and Rethink Robotics:
http://roscon.ros.org/2016/#sponsors
We're still accepting new sponsors. If you'd like to support ROSCon and connect with the ROS community, please contact the organizing committee: roscon-2016-oc@osrfoundation.org.
We'd like to especially thank our Platinum and Gold Sponsors: Fetch Robotics, Clearpath Robotics, Intel, ROBOTIS, ROS-Industrial Consortium / Southwest Research Institute, and Yujin Robot.
Here's another piece of good news, the ROS community keeps spreading in Asia. Particularly in South Korea where ROSCon 2016 will happen.
According to Yoonseok Pyo:
The 5th ROS Korea users seminar & meetup event was held on 16-17 July 2016 at Seoul National University, Korea. The ROS Meetup is designed for beginners of ROS. So we have a time that how to use the ROS such as SLAM and navigation using mobile robot, manipulation using manipulator and MoveIt!.
The first day, we learned the concepts of ROS and basic programming using ROS. The second day, we had a time that how to use the SLAM, Navigation and 'MoveIt!' using mobile robot and manipulator. We had an exciting time over the two days with ROS. https://github.com/robotpilot/ros-seminar
The schedule of the event:
[The first day 8 hours]
01 Introduction to Robot Operating System (ROS)
02 Hello World
03 ROS Basic programming
04 Various development tools of ROS (Command line tools, RViz, RQT)
[The second day 8 hours]
05 Analysis of 8 years
06 SLAM and navigation for mobile robot
07 robot arm modeling and How to use the MoveIt!
08 Three key features of ROS 2.0
For the past year, we have been an effort to expand the ROS in Korea and Japan. We love ROS, and we think that ROS is the future of robotics and will open the market in the service robotics area!
In 2015, the East China Normal University organized the first ROS summer school in China, Shanghai, providing a quick and in-depth learning opportunity for both ROS beginners and advanced ROS users. Now in 2016 the event is happening and we're happy to present the ROS Summer School in China 2016 sponsored by East China Normal University in Shanghai.
According to the organizers:
Robot companies in China have realized the importance of ROS and began building their robot products using the meta operating system. However, learning the ROS framework and its associated components involves a quite a few multidisciplinary concepts, which not only requires developers to have software programming skills, but also to be familiar with robot hardware and even understanding the background of specific industrial applications.
Below is the outline of the program.
Day 1. Academic research talks and tutorials.
Day 2. Representatives from industry share their experiences on application development using ROS.
Day 3. Some introductory ROS courses for beginners.
Day 4. Learning how to integrate ROS with mobile autonomous robots.
Day 5. Some advanced topics in ROS.
Day 6. The topic in computer vision.
Day 7. Lectures in SLAM.
ROS training is something we all should be interested in and it seems to be pretty hot in China recently. The fact that the Robot Operating System gains adepts benefits us all so if you happen to be in Shanghai this July, register for the event and stop by the East China Normal University to learn more about ROS!
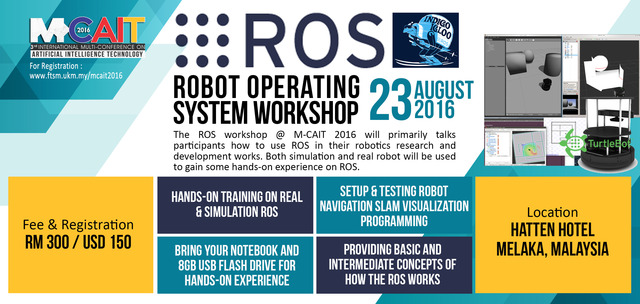
Recently, ROS (Robot Operating System) has been increasing in popularity around the world and rapidly becoming a de facto standard for writing interoperable and reusable robot software. It provides libraries and tools to help software developers and researchers create robot applications. ROS is being used for many of the world's most exciting and capable robots, such as in industry and entertainment. Besides, developers can learn and gain access freely to the comprehensive developer community and support forum.
The ROS workshop at M-CAIT 2016 will primarily talks participants how to use ROS in their robotics research and development works. Both simulation and with real robot namely Turtlebot will be used to gain some hands-on experience on the ROS. The workshop is designed for beginners and professionals providing basic and intermediate concepts of how the ROS works such as autonomous robot navigation for SLAM, visualization and programming. Thus in this case no previous research or ROS experience is required.
AUDIENCE
Academics, research students and engineers at all levels who wish to learn about Robotics Operating System (ROS). Students and researchers involve in computer vision, controlling system and robotics especially in autonomous navigation, will find this workshop helpful.
WORKSHOP SCHEDULE
Introduction and overview to ROS
Using ROS simulation
Using ROS on Turtlebot for SLAM
Understanding ROS programming framework
WORKSHOP REQUIREMENTS AND MATERIALS
This is a hands-on robotics workshop focusing from the basic to intermediate ROS levels. Participants will get presentation slides, ROS software and its tools.
PRE-REQUISITES
The audience is expected to bring a notebook and 8GB USB flash drive for hands-on experience.
In order to make the most of your time at M-CAIT 2016 ROS workshop, it is necessary to come to the sessions prepared and ready to start. Please download the following software or information:
In response to multiple requests for extra time to submit ROSCon
proposals, we will keep the submission period open over the weekend
until midnight California time (UTC-7) on Monday July 11th. Be sure to
submit your proposal(s) before the deadline:
We'd like to especially thank our Platinum and Gold Sponsors: Fetch
Robotics, Clearpath, Intel, ROBOTIS, ROS-Industrial Consortium /
Southwest Research Institute, and Yujin Robot.
With just over 3 months to go before ROSCon 2016, we have some important announcements:
The deadline for submitting presentation proposals is July 8, 2016. If you want to present your work at ROSCon this year, make sure to submit your proposal before the deadline: http://roscon.ros.org/2016/#call-for-proposals.
The conference will be held at the Conrad Seoul. Hotel rooms at the discounted conference rate are limited! Reserve your room today. http://roscon.ros.org/2016/#location. Also listed are some options for child care during the conference, which we hope will be helpful for attendees traveling with families.
We can't put on ROSCon without the support of our generous sponsors, who now include Clearpath Robotics, Southwest Research Institute, GaiTech, and ARM!
http://roscon.ros.org/2016/#sponsors
We'd like to especially thank our Platinum and Gold Sponsors: Fetch Robotics, Clearpath Robotics, Intel, Southwest Research Institute, and Yujin Robot.
Middlesex University is running a one week Intro to ROS summer school 4 - 8 July in London, UK.
This is a practical introductory course in ROS, we will cover what ROS is, the way it works, and how you use it to control robots. We will start with the basic command line tools to get ROS running, and checking whats going on.
You will will learn how to use turtlebots to make maps and autonomously navigate around them. We will look at the basics of the Baxter Robot and how what you have learnt about ROS with one robot can be immediately applied to a very different robot.
We will cover the basics about writing code to work with ROS, and look at using simulation so you can carry on working on things once the course is finished and you may not have immediate access to a robot.
"Spark" is a series of ROS courses co-organized by NXROBO and Exbot Robotics Lab in order to promote the ROS and robotics in China.
The first "Spark-8" course had 8 basic lessons to help fresh-hands learn ROS step by step, while the complete "Spark-20" course had 20 lessons, from basic ROS programming skills to advanced applications such as simulation, SLAM, navigation and so on.
After months of preparation, the project started on the 5th of March, at the Open Source Maker Space in Shenzhen, China. A second session of the project was kicked off on May 21st, at ShenZhen University. Future sessions are expected to be hold in Beijing, Shanghai, Xian, Wuhan.
"Practical and effective" was the main topic of the project. NXROBO and Exbot tried to emphasize the combination of the theory and the practice in a learning-by-doing approach: They took a concrete robot as the model, simulated a real R&D scene, provided first-hand experience of the robotics R&D process, solved the practical problems effectively which ROS amateurs confront. The other distinguishing feature of the Spark Robot Club was a technology exchange platform which gathered top talents of ROS users with practical experience.
The "Spark" initiative became a hot topic in the chinese robotics industry once launched which was beyond expectation. More than 300 people joined the "Spark Robot Club" and the number still keep increasing, from newbies to a savvy specialists. There are members who even came to participate in the event from distant regions in China, including Beijing, Ningbo, Hunan or Guangzhou.
Dr. Tin-Lun Lam (CEO of NXROBO) acted as the tutor of the first course. He has more than ten years of R&D experience in the field of robotics and his exhaustive R&D projects including telepresence robot, tree-climbing robot, four-wheel independent steering and driving vehicle, unmanned sea surface vehicle, 6-axis industrial robotic arm and rescue robot.
In the workshop, Dr. Lam gave an introduction of ROS, its background and development, the design idea and the core concepts. On the other side, Dr. Lam demonstrated the communication mechanism of ROS by accomplish practical operations, gave an in-depth explanation of the basic topic/service of ROS communication layer model and a navigation application on a real robot. In the after-course exchange, Dr. Lam shared his experiences and ideas with the trainees and specialists.
On May 21st, the second open course was held in the auditorium of science building at the University of Shenzhen. Generally, the situation of the robotics education in chinese colleges is fairly harsh and the course materials are rarely updated. Furthermore, courses do not generally involve real robots to assist in the teaching/learning process therefore, NXROBO and ExBot put months into coming up with a ROS training that addressed all these issues.
While highlighting the theoretical aspects, they emphasized the concrete object demonstration to solve the practical problems of the ROS amateurs.
More open courses will be held by NXROBO and ExBot in different regions separately. NXROBO is looking for those who would like to devote themselves to the robot industry to act as tutors, help ROS gain ground among chinese robot amateurs and ultimately promote the development of robot technology.
In Turkey, many college students, researchers and engineers have been learning and using ROS and seeing its value and benefits. Although some people claim learning and using ROS is a slow and painful process, we disagree. 3rd ROS Summer Schools 2016 which is organized by Eskisehir Osmangazi University & Inovasyon Muhendislik, Eskisehir Turkey, ensures a rapid and comprehensive learning chance for ROS users.
The goal of the summer school is to provide participants with hands-on laboratory experience, programming and offline simulation skills and to give them an introduction to novel technologies and trends in the ROS. This hands-on programme provides participants with the opportunity of practical work with ROS. Within programming and offline simulation sessions students will gain skills in real environment by using fully ROS compatible EvARobot which is developed by Inovasyon Muhendislik. The Robotics Summer School includes three-days of workshops and lectures to all trainees (Undergraduate and Graduate Students and Postdoctoral fellows).
In our summer school, first day, information will be provided about the recent state of mobile robot and autonomous vehicle studies. After that introductory practical education for Linux/ROS and its applications will be given. In the second day GAZEBO simulation environment is learned (building an environment and robot model, collection of sensory data (kinect, encoder, sonar, lidar), ROS basic libraries for autonomous vehicles). In the third day fully ROS compatible evarobot is presented. Also some real environment test and demonstrations (wander, remote control, autonomous exploration collection of sensory data (kinect, encoder, sonar, lidar), SLAM-AMCL etc.) are implemented by using evarobot.
Women, members of minority groups, and members of other
under-represented groups are encouraged to submit presentation
proposals to ROSCon.
Proposals will be reviewed by the program committee, which will
evaluate fit, impact, and balance.
We cannot offer sessions that are not proposed! If there is a topic on
which you would like to present, please propose it. If you have an
idea for an important topic that you do not want to present yourself,
please post it to ros-users@lists.ros.org.
All ROS-related work is invited. Topics of interest include:
As mentioned in February News we are offering the next ROS Summer School from 15th till 26th of August 2016 at the University of Applied Sciences in Aachen (FH Aachen), Germany.
This year a special UAV ROS weekend (27/28th August) will complement the ROS Summer School. Over 60 participants are already registered, but there are still some hacking seats left. The registration dead line is coming weekend: 30th of April! Afterwards we will generate a waiting list for more participants. Register now!
The following subjects are covered: ROS Basics, Communication, Hardware Interfacing, Teleoperation, Transforms, Gazebo Simulation, Landmark Detection, Localization, Mapping, Navigation, Control as well as some ROS Industrial exhibition. All this can be experienced with real hardware using our mobile robots - the FH Aachen Rover - after learning some theory.
In addition to the above, it is worth mentioning the big success of our recent ROS Summer School at the Tshwane University of Technology in Pretoria, South Africa. Thanks to people there joining and supporting us. It was great fun and a nice learning atmosphere! We had more than 20 participants and they learned ROS from scratch. After one week, five teams competed with their autonomous FH Aachen Rovers on a round track including Mapping and Localization in a final challenge. After five Summer Schools it was the first time that no Rover hits a wall - congratulations!
This is what our participants just managed in one week, so let's see in August what they can do in two weeks?!
The group photo shows our participants at TUT in South Africa, our colleagues from the 3D printing Goethelab in Aachen, who held as well a Summer School at TUT and us, surrounded by happy robot enthusiasts.
Today may be April 1st, but this is no April Fools' Joke: ROSCon 2016 will take place in Seoul, South Korea between October 8th and 9th! We're very excited to get the ROS community together again to share all of the exciting work that has happened over the last year. ROSCon will directly precede IROS, which is in nearby Daejeon, Korea this year. If you're already planning to attend IROS, just tack on a couple extra days and join us in Seoul!
Stay tuned to the ROSCon 2016 website for updates and submission deadlines. We look forward to seeing you in Seoul later this year!
Southwest Research Institute is hosting a ROS-Industrial Training Class April 6 - 8, 2016 in San Antonio Texas. Wednesday at 8 am, we begin with a functional check of the VM's, and end with a dinner in downtown San Antonio. A more detailed agenda can be found at the ROS-I website.
The classroom portion is similar to the training held last year with the same curriculum and lab option for Descartes. Please bring a laptop to the class with the ROS-I training Virtual Machine pre-installed. This class is geared toward individuals with a programming background who seek to learn to compose their own ROS nodes. Day 1 will focus on basic/introductory ROS concepts. Day 2 will examine motion planning using MoveIt! as well as the Descartes planner and Perception concepts. Day 3 offers a lab programming exercise (with a choice of):
The time for our next ROS Live meeting on Robot Description Formats has almost come!
The meeting will be held this Thursdayat11AM PST/2PM EST/7PM UTC for 1 hour (see time converter). You may want to show up 10-15 minutes early so that we can start on time.
Then open the client and configure your voice chat setting to "Push To Talk" and make sure you remember the hotkey. We also suggest you disable the "Text to Speech" option, unless you enjoy hearing a robotic voice read every text chat that comes in out load.
After four ROS Summer Schools in Aachen, we are happy to announce now our first export ROS Summer School at the Tshwane University of Technology in Pretoria.
It will be a one week event from 07th March 2016 to 12th March 2016 ending up in a competition using the mobile robots developed at FH Aachen. The common mobile robotic topics using ROS will be covered: ROS Basics, Communication, Transforms, Hardware Interfacing, Teleoperation, Landmark Detection, Localization, Mapping and a lot more. After theoretic lectures, we will continue with our hands-on hardware workshops using ROS on the robots as usual.
And because we never gonna stop, we are offering another ROS Summer School at our own university FH Aachen this year again. The event is planned from 15th August till 26th August 2016. Students in the field of Robotics, Mechatronics, Computer Science and Mechanical Engineering or everyone else interested in learning the basic skills of ROS is invited to register now! In this two weeks we are handling the following topics of mobile robotics more in detail:
ROS Basics, Communication, Hardware Interfacing, Teleoperation, Transforms, Gazebo Simulation, Landmark Detection, Localization, Mapping, Navigation, Control, some Industrial exhibition and so on and so on. . . Of course all this topics can be experienced on real hardware using our mobile robots after learning the theory.
And if this is still not enough for you, we offer an additional ROS UAV weekend afterwards from 27th to 28th of August. This will include assembling UAVs, first flight setup, flight modes, ROS interfacing, Landmark Detection and getting in touch with autonomous flying. Feel free to choose this option in our application form. Application form, more information, photos and videos can be found on our homepage:
All is organized by MASCOR. The ROS Summer School is designed to teach participants about how to get started with ROS; it is created for those who have had an interest in autonomous systems, but didn't quite know how to get started. With that, organizers recommend students have a basic knowledge of Linux (Ubuntu) and one programming language such as Python or C++. The two-week program is made possible through Mobile Autonomous Systems and Cognitive Robotics (MASCOR), and key players including Prof. Walter Reichert, Prof. Stephan Kallweit, Prof. Alexander Ferrein, and Prof. Ingrid Scholl.
The time and topic for the February ROS Live meetup are set. The meeting will be Thursday February 25th, 2016 at 2pm EST [1] and will be about Robot Description Formats.
Thank you everyone for voting. Future meetings will likely focus on other highly ranked topics.
Further details about how to participate will be released next week. In the meantime, you can help shape the conversation by visiting the Github page[2] and adding topics you'd like to hear discussed, gripes you have about URDF or other things to spur the conversation. David Lu!! ROS Community Promoter Person (ROSCPP) BossaNova.com / MetroRobots.com
P.S. As it turns out, trying to schedule this meeting was a massively over-constrained problem. There were no perfect solutions, and most options were unavailable for about half the respondents. P.P.S. Due to possible limitations in the number of live participants on the call, please let me know if there are special circumstances for you being on the live call. As mentioned earlier, there will be a way to contribute questions if you're watching the live stream.
The ROS-Industrial Consortium Americas Annual Meeting will be held March 3-4 at Southwest Research Institute headquarters in San Antonio, Texas. Demonstrations are open to the public on March 3 for registered attendees, and will include Scan-N-Plan robotic automation, a mobile manipulator for order fulfillment, and more. Come and learn more about the design of a four-story tall laser coating removal mobile robot from Jeremy Zoss, the lead engineer behind the project who will give the keynote address. On March 4 consortia members will convene to hear updates from ROS-I community leaders in the US, Europe, and Asia. At lunch, Erik Nieves, the CEO of PlusOne Robotics, will present his vision for the future of robotics (keynote). Then the Consortium will provide input to build a roadmap for 2016, and will learn more about the progress and plans for the latest focused technical projects.
I'd like to set up a meetup to occur in February for ROS users in the Seattle area pending working out scheduling with attendees. Likely it would be on a week night for two or three hours at a restaurant or bar or a room with a screen if we can set that up. Periodic meetings to follow if there is sufficient interest.
There is a LinkedIn ROS Seattle group: https://www.linkedin.com/groups/8457866. If you are interested but don't use LinkedIn feel free to email me directly, and if LinkedIn proves unsuitable meetup.com or another invite system can be used. Once the spam problem abates I'll make an entry on http://wiki.ros.org/Events, and get an announcement onto the ros.org blog with a time and date.
Currently there is a modest contingent of members from the University of Washington, and a handful who use it in industry or for personal projects. It would be great to start out with informal discussion of projects and at later meetups have short length presentations from scheduled speakers.
Thursday February 18th 2016 Aalborg University Section for Automation and Control Fredrik Bajers Vej 7, C3-203 9220 Aalborg
At ROSCon 2015, a handful of Danish ROS experts met and decided that it was about time that we had a proper Danish ROS Meetup. These experts came from both industry and academia, and both the southern and the northern part of the country. We want to invite all Danish ROS users to this meetup. Whether you are a user, aficionado or expert, we want you to come. We will share our experiences with ROS and present our different projects that use ROS and hopefully kick-start a useful Danish ROS network.
Participation is free, just send an email to kdh@es.aau.dk to let us know that you are coming.
CALL FOR PRESENTATIONS Please consider presenting your work with ROS. This may be anything from a presentation of a project using ROS to a tutorial on a package that you maintain. Please send an email with your topic to kdh@es.aau.dk
PROGRAM 10:30-12:00 Morning session 12:00-13:00 Lunch 13:00-13:30 Tour of the Automation and Control laboratories 13:30-15:30 Afternoon session
We hope to see you in Aalborg in February. Robotic regards, Karl Damkjær Hansen
The 4th ROS Korea users seminar & meetup event was held on 7-8 November 2015 at Seoul, Korea. Particularly, in the second day, we prepared the tutorial seminar for participants with hands-on experience of ROS. This tutorial seminar arranged 4 section, ROS Basic, ROS Tools like RViz and rqt, ROS Navigation using Turtlebot and ROS MoveIt using ROBOTIS Manipulator, by Jihoon Lee and Yoonseok Pyo. The goal of the seminar & meetup event is to provide the hands-on experience and programming skills when using ROS and ecosystem.
See the links below for the photos of this meetup.
OROCA (www.oroca.org, about 30,000 members) and Korea Open Society for Robotics (https://www.facebook.com/groups/KoreanRobotics/, about 4,300 members) communities have been effort to expand open robotics in Korea. We want to continue this activity with ROS. We are tentatively planning to hold ROS summer school and ROS meetup event in Korea on next year.
We'd like to give special thanks to OSRF, ROS development teams and many ROS users. Also, thanks to our sponsors Korea Institute for Robot Industry Advancement (KIRIA), Yujin Robot, ROBOTIS, MagicEco and Rubypaper.
The videos from ROSCon 2015 have been posted! If you were unable to attend or catch the live stream we recorded all of the presentations as well as the lightning talks.
You can find them linked from the program or view them all here
ROS Industrial will be hosting two upcoming events.
October 21, Stuttgart, Germany
The ROS-Industrial Consortium Europe is hosting a ROS-Industrial Training Class October 21 in Stuttgart, Germany. For details, refer to the event page.
For the first time, this year we have sold out registration for ROSCon!
Due to the capacity limit on the venue at University of Hamburg, we can't accommodate any more registrations. We will *not* have on-site registration this year. If you haven't received an email confirmation of your registration, then we won't be able to admit you to the event.
If you're interested in ROSCon but weren't able to register, you still have options for enjoying the event:
* Thanks to generous sponsorship from Qualcomm, we're live-streaming all the ROSCon talks, free of charge. Closer to the event, a link to the streaming site will be posted here: http://roscon.ros.org/2015/#live-streaming
* As in previous years, we will post videos of the ROSCon talks after the event, free of charge.
* We are maintaining a waiting list, which is being processed as slots open up; if you'd like to be added to that list, send email to roscon-2015-oc@osrfoundation.org.
Thanks for all your support, and we're looking forward to a great ROSCon 2015!
- your ROSCon 2015 Organizing Committee
~~~ Thanks again to our Platinum Sponsors: Canonical / Ubuntu and Fetch Robotics! And our Gold Sponsors: 3D Robotics, Bosch, Clearpath Robotics, GaiTech, Magazino, NVIDIA, Qualcomm, Rethink Robotics, ROBOTIS, Robotnik, ROS-Industrial, Shadow Robot, SICK, and Synapticon! ~~~
Thank you again for coming to the meeting and thanks to the
presenters for making this a fantastic meeting. There were more than 240
people registered and more than 150 who attended from all over the
world. I apologize to those running Ubuntu who had issues joining us
(using Chrome was the suggested solution for the future).
The 1st ROS Summer School in China was held on 23-26 July 2015 at Shanghai. It attracted over 200 participants. This event was organized by Intelligent Robot Motion and Vision Laboratory (directed by Dr. ZHANG Xinyu, http://www.robotics.sei.ecnu.edu.cn) in East China Normal University and co-organized by a robotic startup company AIC-Robotics (http://www.aicrobo.com).
This summer school arranged 8 invited talks delivered by the industrial companies and 17 lectures given by ROS experts. 166 master and Ph.D. students from 48 universities and research institutes, and more than 50 developers and ROS users from the industrial participate this four-day event.
The organizers would like to give special thanks to the following lecturers:
Dr. CHEN Ling (Shanghai University, Shanghai)
Dr. PAN Jia (The University of Hong Kong)
Mr. SHE Yuanbo (AICRobotics Team, Shenzhen)
Mr. LIAO Xinyi (Northwestern Polytechnical University, Xi'an)
Mr. LI Jin (KODA, Shanghai)
Mr. FU Guohe (East China Normal University, Shanghai)
and the following enterprise representatives:
Mr. WANG Xinjun (Shanghai Gaitech Scientific Instruments Co. Ltd.)
Mr. GUO Gaihua (INMOTION, Shenzhen)
Mr. LU Jing (Omakr Robotics, Suzhou)
Dr. ZHENG Yousheng (AVIC JiangXi Hongdu Aviation Industry Group, Nanchang)
Mr. LI Zheng (Hi-Robot, Shanghai)
Mr. ZHANG Hao (DORABOT, Shenzhen)
Mr. XIAN Linbo (WXYZTech, Wu Han)
Mrs. WANG Wei (LEEMAN China, Beijing)
Team VIGIR at the DRC - Stefan Kohlbrecher (Technische Universität Darmstadt)
MoveIt! based Implementation of an I-AUV - Dina Youakim, Pere Ridao, and Narcis Plaomeras (University of Girona)
If you have used MoveIt! on an exciting project or robot and would like to present your work to the community, please don't hesitate to email me at robot.moveit@gmail.com by August 11, 2015.
A final agenda and details on how to take part in the meeting will be sent out next week.
We held the 3rd ROS Korea users seminar & meetup
event at Dong-a University in Busan, on 8 July 2015. We held 1st and
2nd meetup event in Seoul, Korea. However, this time, we held in other
city 'Busan', try to spread ROS in Korea.
The
seminar covered overview for introduction of ROS, SLAM, Navigation,
Moveit and Gazebo. See the links below for the presentation slides.
For the past year, OROCA (www.oroca.org)
community has been effort to expand open robotics software in Korea. We
want to continue this activity with ROS. We are tentatively planning to
hold 4th ROS meetup in Korea on November.
We'd
like to give special thanks to OSRF, ROS development teams and many ROS
users. Also, thanks to Prof. Jong-Wook Kim at Dong-a University and our
sponsors Yujin Robot and ROBOTIS.
In Turkey, many college students, researchers
and engineers have been
learning and using ROS and seeing its value and benefits.
Although some people
claim learning and using ROS is a slow and painful process, we
disagree. 2nd
ROS Summer Schools 2015 which is organized by Eskisehir
Osmangazi University
& Inovasyon Muhendislik, Eskisehir Turkey, ensures a rapid
and
comprehensive learning chance for ROS users.
The goal of the summer school is to provide
participants with hands-on
laboratory experience, programming and offline simulation skills
and to give
them an introduction to novel technologies and trends in the
ROS. This hands-on
programme provides participants with the opportunity of
practical work with
ROS. Within programming and offline simulation sessions students
will gain
skills in real environment by using fully ROS compatible
EvARobot which is
developed by Inovasyon Muhendislik. The Robotics Summer School
includes
three-days of workshops and lectures to all trainees
(Undergraduate and
Graduate Students and Postdoctoral fellows).
In our summer
school, first day, information will be provided about the recent
state of
mobile robot and autonomous vehicle studies. After that
introductory practical
education for Linux/ROS and its applications will be given. In
the second day
GAZEBO simulation environment is learned (building an
environment and robot model, collection of sensory data (kinect,
encoder,
sonar, lidar), ROS basic libraries for autonomous vehicles). In the third day fully ROS
compatible EvARobot is
presented. Also some real environment test and demonstrations
(wander, remote
control, collection of sensory data (kinect, encoder, sonar,
lidar), SLAM-AMCL
etc.) are implemented by using EvARobot.
Thanks again to our Platinum Sponsors: Canonical / Ubuntu and Fetch Robotics!
And our Gold Sponsors: 3D Robotics, Bosch, CoroWare, GaiTech,
Qualcomm, Rethink Robotics, Robotnik, and Shadow Robot!
Long presentations
"MoveIt! Strengths, Weaknesses, and Developer Insights" - Dave
Coleman (University of Colorado Boulder)
"State of ROS 2 - demos and the technology behind" - Dirk Thomas
(OSRF), Esteve Fernandez (OSRF), William Woodall (OSRF)
"Real-time Performance in ROS 2.0" - Jackie Kay (OSRF), Adolfo
Rodríguez Tsouroukdissian (PAL Robotics)
"Bringing ROS to the factory floor: a status report on the
ROS-Industrial initiative" - Mirko Bordignon (Fraunhofer IPA), Shaun
Edwards (SwRI), Clay Flannigan (SwRI), Paul Hvass (SwRI), Ulrich
Reiser (Fraunhofer IPA) Florian Weisshardt (Fraunhofer IPA)
"Commercial models for the robot generation" - Mark Shuttleworth (Canonical)
"An Introduction to Team ViGIR's Open Source Software and DRC Post
Mortem" - Stefan Kohlbrecher (Technische Universitat Darmstadt)
Short presentations
"Automated Driving with ROS at BMW" - Michael Aeberhard (BMW Group
Research and Technology), Thomas Kühbeck (BMW Group Research and
Technology), Bernhard Seidl (BMW Group Research and Technology),
Martin Friedl (BMW Group Research and Technology), Julian Thomas (BMW
Group Research and Technology), Oliver Scheickl (BMW ConnectedDrive
Lab, China)
"Working with the robot_localization Package" - Tom Moore (Charles
River Analytics)
"ROS android_ndk: What? Why? How?" - Gary Servin (Creativa77)
"Accelerating Your Robotics Startup with ROS" - Michael Ferguson
(Fetch Robotics)
"The Descartes Planning Library for Semi-Constrained Cartesian
Trajectories" - Shaun Edwards (SwRI), Jorge Nicho (SwRI), Jonathan
Meyer (SwRI)
"Phobos - Robot Model Development on Steroids" - Kai von Szadkowski
(University of Bremen)
"ROS on DroneCode Systems" - Lorenz Meier (ETH Zurich and PX4),
Roman Bapst (ETH Zurich and PX4)
"Introducing ROS-RealSense: 3D empowered Robotics Innovation
Platform" - Amit Moran (Intel), Gila Kamhi (Intel)
"ROS-driven user applications in idempotent environments" - Matt
Vollrath (End Point), Wojciech Ziniewicz (End Point)
"ROS2 on "small" embedded systems" - Morgan Quigley (OSRF)
"ROS + Docker: Enabling Repeatable, Reproducible, and Deployable
robotic software via Linux Containers" - Ruffin White (Institute for
Robotics & Intelligent Machines at Georgia Tech)
"Maru and Toru: Item-specific logistics solutions based on ROS" -
Moritz Tenorth (Magazino GmbH), Ulrich Klank (Magazino GmbH), Nikolas
Engelhard (Magazino GmbH)
"Mapviz: An Extensible 2D Visualization Tool for Automated
Vehicles" - Jerry Towler (SwRI), Marc Alban (SwRI)
"Docker-based ROS Build Farm" - Tully Foote (OSRF), Dirk Thomas
(OSRF), Dejan Pangercic (Robert Bosch), Daniel Di Marco (Robert
Bosch), Arne Hamann (Robert Bosch)
Since 2012, many college students, researchers and engineers have
been learning ROS (Robot Operating System) for their robotics projects when the
robustness and maintainability of ROS keeps improving. Since 2013, many
robotics companies in China have realized the importance of ROS, started recruiting
ROS developers and integrating ROS into their robotic products. However,
learning ROS framework and its associating components involves a very wide
range of knowledge, which not only requires developers to master software
development skills, but also to be familiar with robot hardware and even the
background of specific industrial applications.
For most people, learning and using ROS is a slow and painful process.
Our ROS Summer Schools 2015 (organized by Intelligent Robot Motion and Vision
Laboratory, East China Normal University, Shanghai, China) provides a quick and
in-depth learning opportunity for ROS beginners and advanced ROS users.
In the first day, some robotics companies are invited to present
their profiles, how they use ROS in their products and recent developments of
robot industry in China. In the second day, we start with some introductory ROS
courses for beginners. In the third day, we tackle the main tasks of
integrating ROS with mobile autonomous robots, i.e. perception, localization
and navigation. In the fourth day, we continue some advanced topics and skills
interesting to many advanced ROS users.
This ROS Summer School also includes some leisure activities,
such as sharing the start-up experience, companies and job seekers discussion,
etc. Every day, attendees have a chance to win prizes, including ROVIO robots, iRobot
Create, Asus Xtion Pro Live RGB-D camera, iRobot Roomba Vacuum Cleaning Robot. For
how to win a prize and registration, please visit our official website for the
details.
This is a friendly reminder that the ROSCon
call for proposals is open until July 7th. ROSCon talks are a great
opportunity to share your work with the community. Submit your proposals
at: http://roscon.ros.org/review
Presentations and tutorials on all topics related to ROS are invited.
Examples include introducing attendees to a ROS package or library,
exploring how to use tools, manipulating sensor data, and applications
for robots.
Proposals will be reviewed by a program committee that will evaluate fit, impact, and balance.
We cannot offer sessions that are not proposed! If there is a topic
on which you would like to present, please propose it. If you have an
idea for an important topic that you do not want to present yourself,
please post it to ros-users@lists.ros.org.
Topic areas
All ROS-related work is invited. Topics of interest include:
Best practices
Useful packages and stacks
Robot-specific development
ROS Enhancement Proposals (REPs)
Safety and security
ROS in embedded systems
Product development & commercialization
Research and education
Enterprise deployment
Community organization and direction
Testing, quality, and documentation
Robotics competitions and collaborations
Proposal submission
A session proposal should include:
Title
Recommended duration: Short (~20 minutes) or Long (~45 minutes)
Summary, 100 word max (to be used in advertising the session)
Description (for review purposes): outline, goals (what will the
audience learn?), pointers to packages to be discussed (500 Words
Maximum)
We're happy to announce that registration is open for ROSCon 2015. You can register here. Early registration discounts are available until September 1st.
Full details on ROSCon are below. Along with registration, the Call for Proposals is still open, and if you are interested in being a sponsor please see our prospectus.
Your ROSCon 2015 Organizing Commitee
ROSCon 2015 is a chance for ROS developers of all levels, beginner to
expert, to spend an extraordinary two days learning from and networking
with the ROS community. Get tips and tricks from experts and meet and
share ideas with fellow developers from around the globe.
ROSCon is a developers conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota, the second version in Stuttgart, Germany, last years event in Chicago, Illinois,
this year's ROSCon will be held in Hamburg, Germany. Similar to
previous years, the two-day program will comprise technical talks and
tutorials that will introduce you to new tools and libraries, as well as
teach you more about the ones you already know. The bulk of the program
will be 30-40 minute presentations (some may be longer or shorter). To
submit a proposal please read the Call for Proposals.
If you don't want to make a formal presentation, you should still
bring your new project or idea to ROSCon! There will be sessions of
Lightning Talks, which are 5-minute mini-talks that are scheduled
just-in-time at the conference. There will also be open space for
Birds-of-a-Feather (BoF) meetings, impromptu hacking sessions, and
informal presentations.
If you are looking for information on past ROSCons see their separate
websites including past programs, slides and videos of the
presentations are available from their programs: ROSCon 2012 Program, ROSCon 2013 Program, and ROSCon 2014 Program.
As more information becomes available this years program will be filled out here.
We held the 2nd ROS Korea users seminar & meetup event in Seoul, Korea on 23-24 of May 2015, hosted by OROCA (www.oroca.org), one of the largest Korean robotics community.
The seminar covered overview for introduction of ROS, rospy, SLAM, navigation, rocon, moveit, DIY mobile robot and drone.
See the links below for the presentation slides, example codes and pictures of this meetup.
For
the past year, OROCA community has been effort to expand open robotics
software in Korea. We want to continue this activity with ROS. We are
tentatively planning to hold 3rd ROS meetup in Korea on November.
We'd
like to give special thanks to OSRF, ROS development teams, many ROS
users and our sponsors KIRIA, Yujin Robot, Gaitech and ROBOTIS.
Proposal acceptance notification -- July 14th, 2015
ROSCon
-------------------------------------------------
ROSCon 2015 is a chance for ROS developers of all levels, beginner to
expert, to spend an extraordinary two days learning from and networking
with the ROS community. Get tips and tricks from experts and meet and
share ideas with fellow developers from around the globe.
ROSCon is a developers conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota, the second version in Stuttgart, Germany, last years event in Chicago, Illinois,
this year's ROSCon will be held in Hamburg, Germany. Similar to
previous years, the two-day program will comprise technical talks and
tutorials that will introduce you to new tools and libraries, as well as
teach you more about the ones you already know. The bulk of the program
will be 30-40 minute presentations (some may be longer or shorter). To
submit a proposal please read the Call for Proposals.
If you don't want to make a formal presentation, you should still
bring your new project or idea to ROSCon! There will be sessions of
Lightning Talks, which are 5-minute mini-talks that are scheduled
just-in-time at the conference. There will also be open space for
Birds-of-a-Feather (BoF) meetings, impromptu hacking sessions, and
informal presentations.
If you are looking for information on past ROSCons see their separate
websites including past programs, slides and videos of the
presentations are available from their programs: ROSCon 2012 Program, ROSCon 2013 Program, and ROSCon 2014 Program.
As more information becomes available this years program will be filled out here.
Submission Guidelines
------------------------------------------------
Presentations and tutorials on all topics related to ROS are invited.
Examples include introducing attendees to a ROS package or library,
exploring how to use tools, manipulating sensor data, and applications
for robots.
Proposals will be reviewed by a program committee that will evaluate fit, impact, and balance.
We cannot offer sessions that are not proposed! If there is a topic
on which you would like to present, please propose it. If you have an
idea for an important topic that you do not want to present yourself,
please post it to ros-users@lists.ros.org.
Topic areas
------------------------------------------------
All ROS-related work is invited. Topics of interest include:
Best practices
Useful packages and stacks
Robot-specific development
ROS Enhancement Proposals (REPs)
Safety and security
ROS in embedded systems
Product development & commercialization
Research and education
Enterprise deployment
Community organization and direction
Testing, quality, and documentation
Robotics competitions and collaborations
Proposal submission
------------------------------------------------
A session proposal should include:
Title
Recommended duration: Short (~20 minutes) or Long (~45 minutes)
Summary, 100 word max (to be used in advertising the session)
Description (for review purposes): outline, goals (what will the
audience learn?), pointers to packages to be discussed (500 Words
Maximum)
The R4SIM workshop is motivated by the need for robotics simulators that
lower the barriers to entering robotics research,
provide a means to realistically and comprehensively simulate systems in conditions, or at scales, that would be unfeasible or impossible to test experimentally, and
enable efficient and reliable transition to and from hardware experiments.
Check out the workshop, call for papers, and important dates at http://r4sim.com/.
Oops, we do it again! After the very successful ROS Summer School 2014, where we had more than 45 participants from all over the world, we are working again on mobile autonomous robots from the 10th until the 21st of August. The official DAAD (German Academic Exchange Program) Summer School, will provide the right starter kit by using our robotic hardware and - of course - ROS. We first start with some days of introductory courses, before we tackle the main tasks of mobile robotics, i.e. perception, localization and navigation.
A highlight is a competition, like an urban challenge, at the end of the summer school: Participants form different teams that have the task to design a typical mobile robotic application like indoor/outdoor exploration. They all use the same hardware, powered by their learnt ROS skills.
The ROS Summer School includes also some leisure activities, such as trips to some interesting sights in the region. Last, but not least we have a farewell barbecue at the end.
Fore more info and some impressions of the ROS Summer School 2014 please check:
We're pleased to announce that we will be hosting ROSCon
2015 October 3rd and 4th in Hamburg Germany, immediately following IROS.
ROSCon 2015 will be a chance for ROS developers of all levels, beginner to
expert, to spend an extraordinary weekend learning from and networking
with the ROS community. Get tips and tricks from experts, network, and
share ideas with fellow developers from around the globe.
ROSCon
is a developers' conference, in the model of PyCon and BoostCon. Similar
to last year, the two-day program will comprise technical talks
and tutorials that will introduce you to new tools and libraries, as
well as teach you more about the ones you already know. The bulk of the
program will be 30-40 minute presentations (some may be longer or
shorter).
To find out more about ROSCon please visit: http://roscon.ros.org/ It has all the past events and more details about ROSCon 2015 will be posted there as they become available.
The Beagle Bone Black (BBB) development board is a great way to begin using ROS for any size Robot project. We have designed a class to get you past the steep learning curve so you can start using your BBB and ROS effectively. This course will focus on basic IO, motor control and switch sensing. At the end of the class you will have:
A working BBB running the latest ROS
A reference BBB interface for a 2 motor controller (we will be using LEDs instead of motors)
Your laptop running ROS via a virtual machine
Time & Place:
- Saturday, May 2, 2015
- 9:00 AM to 3:00 PM
- HackerDojo
- Mountain View, CA
Southwest Research Institute is coordinating with Caterpillar to host a ROS-Industrial Training Class April 29 - May 2, 2015 in Peoria, Illinois. Wednesday at 1 pm, we begin with a tour of a Caterpillar manufacturing plant, and end with a dinner in downtown Peoria. The detailed agenda can be found at the ROS-I website.
The classroom portion is similar to the training held last year with the same curriculum and an added session and lab option for Descartes. Please bring a laptop to the class with the ROS-I training Virtual Machine pre-installed. This class is geared toward individuals with a programming background who seek to learn to compose their own ROS nodes. Day 1 will be split into two tracks: the ROS Basics track will focus on introductory ROS skills; the Advanced track will focus on camera/perception topics. Day 2 will examine motion planning using MoveIt! as well as the Descartes planner and Perception concepts. Day 3 offers a lab programming exercise (with a choice of):
For ROS aficionados in South Korea, there is a seoul tech meetup on March 24th with a few roboticists presenting what is the first of hopefully a series of talks.
Good
chance to catch up and talk with some roboticists over a beer after the
talks, or meet some of the next generation in seoul's tech community.
In parallel to the 13th Symposium on Advanced Space Technologies in
Robotics and Automation (ASTRA) at the European Space Research and
Technology Centre (ESTEC) and the Experts Forum on Robot Control
Operating Systems (RCOS) for space and industrial applications.
It will consist of 20-30 minutes presentations concerning technical
talks from developers and users in a similar style of ROSCon and
PyCon.
Theme:
Development, tutorials and robotics field application using
Rock/Orocos are welcome to contribute. Sustainable systems,
scalability, re-usability, field/ real-time applications, system
deployment, plan managers, rock integration with existing systems,
communication layers, error handling, system recovery and other
topics concerning the use and development of Rock/Orocos in robotics
are relevant to participate.
Proposal submission:
Technical talks of all topics related to Rock/Orocos are invited to
participate in the workshop. Best workshop talk will be awarded!
We
are announcing the detailed agenda for the ROS-Industrial Consortium
Americas annual meeting, which will take place in conjunction with
Automate 2015. Note that there is also a pre-meeting dinner on March 26 that is included with your registration.
Time: 8:30 AM - 4:00 PM CST (Chicago time) on Friday, March 27
Place: Palmer House Hilton Hotel, Chicago Room on 5th floor. Only two miles from the McCormick Place convention center in Chicago, IL.
Agenda:
0830 Registration/check-in and light breakfast
0900 Welcome and Consortium updates
0945 ROS-I Roadmap Presentation
1000 Break
1015 Invited ROS-I Presentations
Cessna/CNRC - Robotic Routing
Caterpillar - Agile Automation
Wolf Robotics - Technology Transfer to Practical Applications
We take ROS very seriously at Shadow - it's at the heart of our robots and systems.
As part of that, we've organised a ROS Community workshop at the European Robotics Forum this year, on Friday 13th at 16.15 in Room 2.
The workshop has three parts:
Overviews of ROS - where it is, where it's going, what the Big Picture is.
Lightning talks on problems in ROS now - what makes it hard or easy or you to use it? What would help?
Roadmapping - what do we need and in what order? What's important?
If you use ROS, or you manage a project that relies on ROS, you should come to the workshop and contribute!
If you want to know more, or you have a definite lightning talk to give, then please get in touch. - see this linkfor the webpage with contact details!
We held the first time ROS Korea users seminar & meetup in Seoul,
Korea on 21-22 of December 2014, hosted by OROCA (www.oroca.org), one
of the largest korean robotics community.
The seminar covered overview for introduction, navigation, moveit,
UAV, and community briefly by speakers from various groups in Korea.
Yaskawa
Motoman Robotics is pleased to announce sponsorship of the Amazon
Picking Challenge to
be held in conjunction with ICRA 2015. This open competition will
further the development of robot skills required for e-commerce and
other material handling. Yaskawa Motoman is offering consignment
robots to select teams entering the challenge. Selected teams will
receive their choice of robot model in January, 2015 and may keep
them through June, subject to model availability. To apply for a
Motoman consignment robot, please submit the following items via
this form by
midnight PST December
17, 2014 January
16, 2015 (extended deadline).
Video
of a simulated robot executing a picking task
Link
to your team/organization website
Completed
application describing your Motoman hardware utilization plan
Yaskawa
Motoman will provide robots, software (including our MotoROS driver),
and onsite technical support both at the team's location and the
event.
To
support your development efforts, the ROS-Industrial Consortium will
be updating its pick
and place tutorial to
include the Motoman MH5 II model. The tutorial will also be updated
to ROS Indigo.
Toyota Motor Corporation (TMC) hosted a 2-day hackathon on their HSR (Human Support Robot) on October 23th and 24th in Tokyo. TORK assisted the event and the software.
HSR has been developed as an elderly care for domestic situations as well as in medical facilities. This time TMC invited researchers and students from institutes in Japan. 15 participants got a hands-on experience, tried out making small tasks to let the mobile-manipulator robot interact with human, and had fun.
All of the higher-end functionalities such as self-localization, vision-based collision avoidance, motion planning and so on are available via a de-facto standard opensource robotics framework ROS (Robot Operating System) (that is, as previously announced). It also comes with script language interface so that it doesn't require developers to be well acquainted with ROS.
With the feedback from the attendees this time TMC expects to boost the development in the future.
A write up of the event with photos can be found here.
Greetings colleagues! We are excited to announce a new manipulation contest to be held at ICRA in May 2015 (http://icra2015.org) in Seattle, WA, USA.
This may be of particular interest to the ROS community since we are encouraging researchers to push their new developments into the open-source domain (as a requirement to be eligible for the available travel support and contest prizes). We hope this leads to the contribution of new and interesting work within ROS.
------------------
Amazon is able to quickly package and ship millions of items to customers from a network of fulfillment centers all over the globe. This wouldn't be possible without leveraging cutting-edge advances in technology. Amazon's automated warehouses are successful at removing much of the walking and searching for items within a warehouse. However, commercially viable automated picking in unstructured environments still remains a difficult challenge. In order to spur the advancement of this fundamental technology we are excited to be organizing the first Amazon Picking Challenge at ICRA 2015. It is our goal to strengthen the ties between the industrial and academic robotic communities and promote shared and open solutions to some of the big problems in unstructured automation. To this end the contest will be awarding travel grants to ICRA 2015, practice equipment, and a large prize pool for the competition winners.
This competition will challenge entrants to build their own robot hardware and software that can attempt simplified versions of the general task of picking items from shelves. The robots will be presented with a stationary lightly populated inventory shelf and be asked to pick a subset of the products and put them on a table. The challenge combines object recognition, pose recognition, grasp planning, compliant manipulation, motion planning, task planning, task execution, and error detection and recovery. The robots will be scored by how many items are picked in a fixed amount of time, with $26,000 in prizes being awarded. Participants will be encouraged to share and disseminate their approach to improve future challenge results and industrial implementations.
------------------
Find out more and sign up for email updates at the challenge website:
Thanks to everyone for another fantastic ROSCon! It was a fun event, filled with great presentations and discussions, plus many of those, "we've Internet-known each other for years, but are now meeting for the first time," moments. We'll post the videos and slides as soon as we can, linking them from the program page.
Here's the group at the end of the event (thanks to Chad Rockey for being our photographer):
And here's one way to break down the demographics of the attendees, based on their type of affiliation:
We're looking forward this weekend to another great ROS event!
This will be the third ROSCon. To get into the mood take a look through the old sites for 2012 and 2013. They include links to the old programs as well as video recordings of the presentations available for viewing.
This year we have a great program with 19 reviewed presentations on the use of ROS in environments ranging from deep mines to low earth orbit.
As you prepare please think about topics for lightning talks or birds of a feather discussions. Everyone will have an opportunity to pitch both at the conference. For lightning talks you can prepare a few slides but don't try to do things which are too fancy.
We look forward to seeing you there. There will be some construction on the Blue Line which may make travel from the airport a little harder. We have posted detail on the website.
If you're attending you can add photos to the Google+ Event, or if you can't make it but want to see what's going on watch the event as well as hashtags #ROSCon2014 or #ROSCon
Early registration for ROSCon 2014 closes this Friday, August 15th. Register today to confirm your spot, save money, and ensure that you get a ROSCon t-shirt.
In addition, the deadline for the reduced rate rooms at the Palmer House is next Thursday, August 21st. Book your room today.
ROS Meetup Chicago! Calling all Chicago-land ROS Users!
For the past year, University of Illinois at Chicago Engineering Design Team (EDT) has been implementing ROS in all of its autonomous robots. With the progress that has been made with the understanding and implementation of ROS, the idea of hosting a group in Chicago that would be open to all that are interested in ROS was apparent. By creating this group, everyone could help make significant advancements in the field of robotics through the exchange of ideas.
We'd like to thank the many companies who have supported ROSCon this year through sponsorship. The support of our sponsors helps us provide the highest quality meeting possible while keeping the registration fees down. Below are our sponsors for this year. If you're not familiar with what they are doing in the ROS community come by and talk with them at ROSCon.
As a quick reminder if you have not already registered. Early registration closes on August 15th. You can register here.
It's still possible to become a sponsor. If you'd like to lend your support to ROSCon, please contact us at roscon-2014-oc@osrfoundation.org.
We're happy to announce the program for ROSCon 2014 has been posted and that registration is now open.
The early registration deadline is August 15, 2014.
The program fills two days with talks on applications of ROS from outer space to inside mines as well as overviews of useful tools for both research and product development. There will also be presentations on upcoming development and ongoing efforts to make ROS available on more platforms.
In addition to the talks ROSCon will feature two lightning talk sessions and two birds of a feather sessions, all organized on-site. The lightning talks are an opportunity for you to have 3 minutes to present a topic of your choice: introduce a new project, recruit collaborators or users to an existing project, announce a product, whatever you like.
Immediately follow the lightning talks are birds of a feather sessions, which are an opportunity to propose and find people to talk about topics of interest to subgroups at the conference. This will be a mostly unstructured time with topics proposed on site and groups forming organically.
Before you come to ROSCon, think ahead about any topic you'd like to propose for the BoF sessions and have some slides ready to present a lightning talk (3 slides or fewer).
We look forward to seeing you in Chicago in September!
ROSCon 2014 will take place at the Palmer House, which is the same location at IROS. There is a discounted group rate available. Details are posted at http://roscon.ros.org/2014/location/
Proposal acceptance notification -- July 22nd, 2014
ROSCon
-------------------------------------------------
ROSCon 2014 is a chance for ROS developers of all levels, beginner to expert, to spend an extraordinary two days learning from and networking with the ROS community. Get tips and tricks from experts and meet and share ideas with fellow developers from around the globe.
ROSCon is a developers conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota (http://roscon.ros.org/2012) and last year's event in Stuttgart, Germany (http://roscon.ros.org/2013) this year's ROSCon will be held in Chicago, Illinois. Similar to last year, the two-day program will comprise technical talks and tutorials that will introduce you to new tools and libraries, as well as teach you more about the ones you already know. The bulk of the program will be 30-40 minute presentations (some may be longer or shorter). To submit a proposal please visit the Call for Proposals page (http://roscon.ros.org/2014/call-for-proposals/)
If you don't want to make a formal presentation, you should still bring your new project or idea to ROSCon! There will be sessions of Lightning Talks, which are 5-minute mini-talks that are scheduled just-in-time at the conference. There will also be open space for Birds-of-a-Feather (BoF) meetings, impromptu hacking sessions, and informal presentations.
Submission Guidelines
------------------------------------------------
Presentations and tutorials on all topics related to ROS are invited. Examples include introducing attendees to a ROS package or library, exploring how to use tools, manipulating sensor data, and applications for robots.
Proposals will be reviewed by an ad-hoc committee that will evaluate fit, impact, and balance.
We cannot offer sessions that are not proposed! If there is a topic on which you would like to present, please propose it. If you have an idea for an important topic that you do not want to present yourself, please post it to ros-users@lists.ros.org.
Topic areas
------------------------------------------------
All ROS-related work is invited. Topics of interest include:
Best practices
Useful packages and stacks
Robot-specific development
ROS Enhancement Proposals (REPs)
Safety and security
ROS in embedded systems
Product development & commercialization
Research and education
Enterprise deployment
Community organization and direction
Testing, quality, and documentation
Robotics competitions and collaborations
Proposal Submission
------------------------------------------------
A session proposal should include:
Title
Recommended duration (Short or Long)
Summary, 100 word max (to be used in advertising the session)
Description (for review purposes): outline, goals (what will the audience learn?), pointers to packages to be discussed (500 Words Maximum)
The fee for the ROS-RM 2014 Workshop is 100 Euros.
Registration covers attendance to all lectures, handling material, two coffee breaks and one lunch from the University to Alicante city. Payment should be done by bank transfer (more information at the web site).
ROS-RM Workshop 2014 will be held at the Polytechnic College of the University of Alicante, in San Vicente del Raspeig (Alicante), Spain. Alicante is located on south east at the Mediterranean coast. The University is 15 minutes from the city center of Alicante by tram, while the Alicante airport is 20 minutes by car.
The hands-on will be delivered by world renowned experts in the field, from both academia and industry, and will cover both theoretical and practical aspects of different tools integrated in ROS.
The workshop aims to provide a stimulating opportunity for young researchers and Ph.D. students. The participants will benefit from direct interaction and discussions with world leaders in ROS framework.
The fee for the ROS-RM 2014 Workshop is 100 Euros.
Registration covers attendance to all lectures, handling material, two coffee breaks and one lunch from the University to Alicante city. Payment should be done by bank transfer (more information at the web site).
ROS-RM Workshop 2014 will be held at the Polytechnic College of the University of Alicante, in San Vicente del Raspeig (Alicante), Spain. Alicante is located on south east at the Mediterranean coast. The University is 15 minutes from the city center of Alicante by tram, while the Alicante airport is 20 minutes by car.
The hands-on will be delivered by world renowned experts in the field, from both academia and industry, and will cover both theoretical and practical aspects of different tools integrated in ROS.
The workshop aims to provide a stimulating opportunity for young researchers and Ph.D. students. The participants will benefit from direct interaction and discussions with world leaders in ROS framework.
June 27: ROS-Industrial Consortium Europe Kick-Off (restricted to RIC-members)
Conference Objectives
---------------------------
The objective of the ROS-Industrial conference is to bring together representatives from academia and industry to exchange experiences on application development with ROS and clarify the needs of industry with respect to ROS-Industrial. The participants have the opportunity to obtain most recent information on current activities, already achieved results and future goals of the ROS-Industrial community.
Conference Topics:
------------------------
- Developments, Trends, Technologies in the ROS-Industrial community
- Examples of successful transfer of ROS components established in research into industrial applications
- Current ROS-Industrial Projects (hosted by the ROS-Industrial Consortium so far)
Target Audience
--------------------
The conference addresses in particular system integrators that aim at providing flexible, economic and manufacturer independent automation solutions, ROS-Industrial developers in research and industry, executive personal of small and medium enterprises as well as R&D divisions of larger companies in the field of automation, logistics and production.
Speakers
------------
-Urko Esnaola, Tecnalia
-Andrija Feher, Synapticon GmbH
-Clay Flannigan, Southwest Research Institute
-Joshua Hampp, Fraunhofer IPA
-Gijs van der Hoorn, TU Delft Robotics Institute
-Berend Küpers, ALTEN Nederland
-Fabrizio Romanelli, Comau S.p.A. Robotics
-Dirk Thomas, Open Source Robotics Foundation
-Elisa Tosello, University of Padova
-Florian Weißhardt, Fraunhofer IPA
General Chair
-----------------
Martin Hägele, Fraunhofer IPA
Session Chair
-----------------
Ulrich Reiser, Fraunhofer IPA
Registration
-----------------
Register for ROS-Industrial conference until June 18, 2014:
A new generation of innovative robotic platforms is emerging with human cadenceand more adaptable automation solutionsRobots are learning to perform complex tasks and to interact with humans in boundless environments.
Will these robots facilitate the predicted re-shoring or renaissance in US manufacturing? And what will be the economic consequences of this new co-habitation? Join us on Thursday, May 29th, 2014 to find out!
We're looking forward to ROS Kong in two weeks. In preparation for the event we're happy to publish the abstracts of the presentations.
Open Source Robotics at JSK/Tokyo
Kei Okada
Robotics, specially Humanoids research requires long-term vision and efforts due to it's complexity and synthesis. This talk will show research history on humanoid robots last 20 years at JSK/U-Tokyo and discuss how we have been integrating and maintaining integrated humanoid software over different generation of both students and robots. Rapid-prototyping and contentious-development is the key of these environment and how these features are utilized in national/international projects and challenges. From this perspective, emergence of opensource robotics had great impact since we already had great deal of in-house software resources and had to cope with how to fuse and connect existing internal software and external open software. I'll not only explain strategy to this integration but also show our automatic translation system of different software component.
Lastly, I'll explain our effort on commercializing our software in Tokyo to expand open robotics software not only academia but also robotic industries.
Robot Middleware Standard: RT-Middleware: Its architecture, implementation and standardization
Noriaki Ando
RT-Middleware (RTM) is an OMG standard specification of a
component model and its implementations for robotic systems. We
already have a dozen of implementations, and interoperability among
implementations are guaranteed by the standard specification.
Moreover its ports mechanism enables interoperability to other
middlewares such as ROS DDS and so on, and the execution context
feature of RTM realizes real-time capabilities, which is utilized in
HRP, Hiro/Nextage and SHAFT's humanoid and so on. In this talk, the
concept of RT-Middleware, architecture and implementations will be
introduced. New standardization activity in OMG to define unified
software component model will also be presented. As other topic, our
collaboration with US DoD in DARPA DRC and new projects will be
mentioned.
ROS at CSIRO
Paulo Borges
In this talk we will discuss how our team at CSIRO is using ROS in our robotic platforms, including internal projects and development processes.
CSIRO is Australia's national research agency and our lab, the Autonomous Systems Laboratory, has a very strong focus on field robots, carrying out research on ground, air, and underwater vehicles.
The ROS-based platforms we will present include autonomous industrial ground vehicles, air vehicles, thermal-camera based 3D mapping and the Zebedee 3D laser-scanner.
I will show how the platforms combine out-of-the-box ROS packages with in-house developed packages, indicating where ROS works perfectly as well as some of the issues we face.
Finally, we will also contrast ROS with DDX (Dynamic Data Exchange), which was our successful alternative before ROS was made available.
ROS, Atlas and the DARPA Robotics Challenge
Wyatt Newman and Chris Swetenham
This presentation will review use of ROS in controlling a Boston Dynamics "Atlas" humanoid robot competing in the DARPA Robotics Challenge as "Team HKU" (Hong Kong University).
Atlas robots were delivered in August, and the DRC "trials" were held in December, allowing very little time for interfacing to and programming of this new robot. Additionally, a challenging constraint of the DRC is limited communications between the robot in the field and a remote operator. A specific ROS challenge was the need to run local and remote ROS cores to limit communications via a "net tunnel." Use of ROS will also be described in the contexts of locomotion planning, manipulation planning, vision-guided manipulation, balancing and force control. Live Atlas demonstrations will be performed.
Getting Into ROS: What's available and how to use it easily
Daniel Stonier
In this presentation I will discuss various approaches and technologies that are at your disposal when wishing to
connect to a ROS robot. ROS has a large and sometimes bewildering variety of solutions in its arsenal - ssh
tunnels, remotely networked ROS pc's, rqt plugins, robot web tools, java-android apps, pairing with
application managers and also some more esoteric multimastering techniques. However, what is right for your team and
your user's needs? This can be a complex question and a lack of documentation or knowledge
about the technologies and languages they use often makes the answer non-trivial.
Here I will introduce each method with some tips and a list of pros and cons. Finally I will
conclude with an overview and a few directional pointers so that you can get your own connectivity
needs kickstarted without undue time consuming experimentation.
If you haven't already, there's still space to register.
The fee for the ROS-RM 2014 Workshop is 100 Euros.
Registration covers attendance to all lectures, handling material, two coffee breaks and one lunch from the University to Alicante city. Payment should be done by bank transfer (more information at the web site).
APPLICATION DEADLINE: 20 June 2014 (NO extensions will be given)
ROS-RM Workshop 2014 will be held at the Polythecnic College of the University of Alicante, in San Vicente del Raspeig (Alicante), Spain. Alicante is located on south east at the Mediterranean coast. The University is 15 minutes from the center city of Alicante by tram, while the Alicante airport is 20 minutes by car.
SPEAKERS AND PROGRAMME
Juan Antonio Corrales, Marie Curie University, Paris-France
Sachin Chitta, SRI, USA.
Guillaume Walck, University of Bielefeld, Germany
Federico Tombari, University of Bologna, Italy
Toni Oliver, Shadow Robot Company, UK
Session 1: ROS Architecture. Introduction and basic concepts
Session 2: MoveIt! A Tool for Manipulation
Session 3: Manipulation with a Dexterous Hand
Session 4: 3D Object recognition with the PCL
Session 5: Shadow-hand with ROS
MOTIVATION AND DESCRIPTION
The hands-on will be delivered by world renowned experts in the field, from both academia and industry, and will cover both theoretical and practical aspects of different tools integrated in ROS.
The workshop aims to provide a stimulating opportunity for young researchers and Ph.D. students. The participants will benefit from direct interaction and discussions with world leaders in ROS framework.
ORGANIZERS
Automation, Robotic and Artificial Vision (http://www.aurova.ua.es)
I'd like to draw your attention to the upcoming Intelligent Autonomous Systems (IAS) conference, to be held in Padova in July 2014. The conference is focused on the topic "Bring autonomous robots into industrial production", and is connected to several events about ROS and robot perception, including the following workshops:
- 3D Robot Perception with Point Cloud Library (PCL) - ROS Industrial in European Research Projects - Recent Advances in Agricultural Robotics - Advances in Marine Robotics Applications - Connected Service Robotics for Telecommunications Operators
and a tutorial on the Point Cloud Library (PCL).
You can find further information on the conference web page:
We're closing in on the Indigo Release quickly. Today our last package was released to fill out ros desktop and desktop full. There are a few packages which need to be fixed to make the release ready for testing. In preparation for the upcoming release we already have 430 packages released and building on the buildfarm. We expect many more to have been released by the final release planned for later this month.
Also as a reminder coming up in June is ICRA and ROSKong. If you are presenting a paper in which you used ROS and think other ROS users would be interested, we would like to feature it on ROS News blog please email us at ros-news@googlegroups.com
And one last reminder that the Indigo Igloo T-Shirt is available for only 19 hours more hours. We've had a great response at the end of the campaign and want to make sure the you don't miss your opportunity.
lease find the program and agenda for the ROS-Industrial Basic Developers' Training Class May 19-20, 2014. This class, similar to the one held in June 2013, is geared toward individuals with a programming background who seek to learn to compose their own ROS nodes (now in ROS Hydro). The first day will be in the classroom focused on background ROS/ROS-I skills, and the second day will be devoted to a lab programming exercise: a collision-free pick-and-place application (video below) with real industrial robot hardware. Bring a laptop to the class with the training exercise Virtual Machine pre-installed.
Two Colorado robotics Meetup groups, Boulder is for Robots andROS on the Rocks, teamed up to provide an evening full of ROS centric demos, presentations, and discussion. Promises of robot demos and free pizza drew an audience of more than 60 people from academics, industry, and robotics enthusiasts. The event was hosted on the CU campus, and was sponsored by the local Colorado robotics company, Orbotix - creators of the Sphero platform.
Daniel Packard, a contractor with Clearpath Robotics, kicked off the evening with a bare bones introduction to the ROS framework. He introduced many of the core concepts in ROS, and he concluded with a brief demonstration using Sphero, an Xbox360 controller, and a pan-tilt mount from RoadNarrows Robotics.
Dave Jilk of eCortex spoke about his efforts to use ROS to connect a neural network simulation system, known as Emergent, to simple robotic platforms, including an iRobot Create and an attached Android phone. His approach included running ROS on a cloud server with ROSBridge, and a Gazebo simulation of the combined platform.
Dave Coleman, a PhD student at CU Boulder, introduced one of ROS's most popular packages - the MoveIt! Motion Planning Framework. Drawing from his experience helping develop it, he discussed its features, some of the theory behind it, and its popularity and usage today in controlling robots around the world.
Our first ROS Summer School in 2012 showed that a lot of students and external researchers were interested in mobile autonomous systems, but did not know how to start. Our ROS Summer Schools provide the right starter kit by using a self-developed, low cost robotic hardware and - of course - ROSsoftware. First, we start with some introductory courses, before we tackle the main tasks of mobile robotics, i.e. perception, localization and navigation. Every day these main tasks are implemented on the hardware and tested on our test track, where the mobile systems have to fulfill some predefined tasks, from simple teleoperation to autonomous navigation.
A highlight of the work shop is a competition at the end of the third week: Summer school participants form different teams to design a typical mobile robotic application like indoor/outdoor exploration. All teams use the same hardware controlled by their acquired ROS skills.
The ROS Summer School includes also some leisure activities, such as day trips to Maastricht and Paris, where we also pay a visit to Aldebaran. Last but not least, we have a farewell barbecue at the end.
For more information and registration please visit
* Lightning talks: One of our most popular events, lightning talks are back-to-back 3-minute presentations that are scheduled on-site. Bring your project pitch and share it with the world!
* Birds-of-a-Feather (BoF) meetings: Get together with folks who share your specific interest, whether it's ROS in embedded systems, ROS in space, ROS for products, or anything else that will draw a crowd.
To keep us all together, coffee breaks and lunch will be catered on-site. There will also be a hosted reception (with food and drink) at a classic Hong Kong venue at the end of the day. Throughout the day, there will be lots of time to meet other ROS users both from Asia and around the world.
I would like to announce the second ROS-Industrial community forum for community discussion and presentation of new developments of the ROS industrial community. The forum will take place online at on April 28th, 2014 at 5pm CET (11am EST). You can register to participate at http://www.anymeeting.com/PIID=EA55DB83834F39&rslt=499f2da9-76c8-46b4-bfb3-f 0913bc9d4da
The agenda of the forum will be as follows: * Introductions and Forum Overview (Alexander Bubeck - Fraunhofer IPA) * Comau Controllers Evolution and Q&A - C4G/C5G Open (Fabrizio Romanelli - COMAU and Elisa Tosello - University of Padua) * A non real-time ROS interface for a real-time controller * Preliminary results * 6 Lightning Talks about current developments in the ROS Industrial community (Community) * Upcoming Contributions (Community) * Wish List Discussion (Community) * General Q&A and Upcoming Events (Alexander Bubeck - Fraunhofer IPA)
For the lightning talks about developments or projects in an industrial we accept proposals from now on a first come first serve basis. We will have 6 slots of 5 minutes for this community forum. Just give me a short direct email at alexander.bubeck@ipa.fraunhofer.de with the topic you want to talk about. The slides (not more than 3) have to be send to me by April 26th 2014.
We're thrilled to host such an esteemed group of speakers who
represent so many different aspects of the Australasian ROS community,
from research to product development.
Reminder: the early
registration
deadline is April 30th.
We're pleased to announce that registration is now open for ROS Kong 2014, an international ROS users group meeting, to be held on June 6th at Hong Kong University, immediately following ICRA:
This one-day event, our first official ROS meeting in Asia, will complement ROSCon 2014, which will happen later this year (stay tuned for updates on that event).
ROS Kong 2014 will feature:
* Invited speakers: Learn about the latest improvements to and applications of ROS software from some of the luminaries in our community.
* Lightning talks: One of our most popular events, lightning talks are back-to-back 3-minute presentations that are scheduled on-site. Bring your project pitch and share it with the world!
* Birds-of-a-Feather (BoF) meetings: Get together with folks who share your specific interest, whether it's ROS in embedded systems, ROS in space, ROS for products, or anything else that will draw a crowd.
To keep us all together, coffee breaks and lunch will be catered on-site. There will also be a hosted reception (with food and drink) at a classic Hong Kong venue at the end of the day. Throughout the day, there will be lots of time to meet other ROS users both from Asia and around the world.
If you have any questions or are interested in sponsoring the event please contact us at roskong-2014-oc@osrfoundation.org.
Sincerely,
Your ROS Kong 2014 Organizing Committee
Tully Foote, Brian Gerkey, Wyatt Newman, Daniel Stonier
Organizer? ROS Japan User's Group and Mamezou Inc. Number of participants? 30 Venue? 2-7-1 Nishi Shinjuku, Shinjuku City, Tokyo Dates? April 12, 2014 at 13:30 ~ 18:30 Twitter hashtag? #rosjp
We're pleased to announce that we will be hosting ROS Kong 2014, an international ROS users group meeting, in Hong Kong on June 6h, immediately following ICRA. This one-day event will complement ROSCon 2014, which will happen later in the year (see below).
ROS Kong 2014 will feature invited speakers, lightning talks, and Birds-of-a-Feather sessions. There will be plenty of time to meet other ROS users both from Asia and around the world.
If you are interested in attending, please save the date: Friday June 6h, 2014. We will be setting up registration and distributing more information in the coming month. We have a large auditorium but registration will be limited.
If you have any questions or are interested in sponsoring the event please contact us at roskong-2014-oc@osrfoundation.org.
In related news, we are tentatively planning to hold ROSCon 2014 in Chicago in September, in conjunction with IROS. Stay tuned for more on that event.
We are delighted to invite you to attend our next Members' Meeting for the ROS-Industrial Consortium. We will commence on March 5th with a one-day training session focused on application development. This session is free for Consortium Members and $750 for non-Members. The training is appropriate for anyone with a robotics background and wondering, "What can I do with ROS-Industrial?". Training topics will include pick and place application development, calibration, perception, and planning. Day 2 is reserved for Consortium Members only and will include technical roadmapping activities and a review of current and future focused technical projects.
Agenda Summary
March 5: Training
0730
Pickup at the Hotel
0800-0830
Registration and Light Breakfast
0830-0845
Welcome
0845-1015
Training Block 1
1015-1030
Break
1030-1200
Training Block 2
1200-1330
Lunch and Demonstrations
1330-1500
Training Block 3
1500-1515
Break
1515-1645
Training Block 4
1645
Wrap Up, Transportation to Hotel
1900
Networking Dinner at Acenar on the San Antonio Riverwalk
March 6: Members' Meeting
0730
Pickup at the Hotel
0800-0830
Registration and Light Breakfast
0830-0845
Welcome and Introductions
0845-0915
Consortium Administrative Updates
0915-1200
Technical Roadmapping
1200-1330
Lunch and Keynote
1330-1400
Current Focused Technical Project Updates
1400-1600
New Focused Technical Project Discussions
1600-1630
Open Discussion
1630-1700
Wrap Up
1700
Transportation to Hotel
1900
Networking Dinner at Paesanos on the San Antonio Riverwalk
Registration
Registration is required, but is free for members. Non-members may attend the training for a fee.
Accommodations
A block of rooms has been reserved at the: Drury Plaza Hotel Riverwalk 105 South St Marys Street San Antonio, Texas 78205 210-270-7799
To reserve your room at the special rate, please use code: "ROS-I Consortium"
Transportation
The nearest airport is San Antonio International. A rental car is not required; airport to downtown shuttles are available for $19 and taxis are approximately $30. Venues will be within walking distance or via the Consortium-provided shuttle.
Shaun Edwards has anounced the next ROS Industrial Community Meeting
ROS-Industrial Quarterly Community Meeting
10:00 a.m. - 11:15 a.m. (CST) Thursday, December 5, 2013
Virtual Web Meeting
ROS-Industrial will host an open forum to discuss the general direction of the program, learn about new technologies, and to publicize the work and most importantly the needs of the community. All are invited, but the main target audience for this meeting are developers and end-users.
Agenda (CST)
· Introductions and Forum Overview (Shaun Edwards - SwRI)
· BRIDE Presentation and Q&A - A Toolchain for Model-Based Software Development (Alexander Bubeck - Fraunhofer IPA)
· Upcoming Contributions (Community)
· Wish List Discussion (Community)
· General Q&A and Upcoming Events (Shaun Edwards - SwRI)
Gaitech will be holding a workshop later this month to encourage the development of ROS in China, if you are in the area please get involved!
The Future of ROS and its applications
This workshop aims to discuss recent developments within ROS, and how they can be best utilized by Robotics researchers in China. With speakers from a number of top robotics institutions, and featuring sessions on trajectory planning in MoveIt, integrating your platform into ROS and computer vision, this is sure to be one of the best ROS events in China this year.
We would love to hear about the ROS research you're involved in, if you'd like to present your research in the end-user discussion session please let us know.
Paul Hvass from the ROS Industrial Consortium has the following reminder:
You will find a number of ROS and ROS-Industrial related events at RoboBusiness:
ROS-Industrial Consortium members' meeting: 9:00 a.m. to Noon on October 23 (details below)
ROS-I Consortium Panel Discussion: ROS-Industrial will be the topic of a panel discussion during theAgile Manufacturing Workshop. The panel will consist of automation experts from Boeing, Yaskawa, and Southwest Research Institute who will discuss current industry trends and opportunities and how ROS-I can accelerate implementation of next generation industrial solutions -- 2 p.m. on October 23.
ROS Matures and Looks Ahead: A presentation by Ryan Gariepy, CTO and Co-Founder of Clearpath Robotics -- 2:45 p.m. on October 24
Building Industrial Robots for Dynamic Response: A presentation by Clay Flannigan, Manager of Robotics and Automation Engineering, Southwest Research Institute -- 1:30 p.m. on October 25
Marrying ROS to External Software: A presentation by Tully Foote, ROS Platform Manager, Open Source Robotics Foundation -- 2:15 p.m. on October 25
SwRI/ROS-Industrial Exhibitor Booth #328: meet in person with SwRI ROS-I experts
ROS-Industrial Consortium
ROS-Industrialis an open-source software framework for next-generation manufacturing automation. Be part of the community: Leverage advanced capabilities from the Robot Operating System (ROS) like mobile manipulation, on-the-fly path planning, collision avoidance, grasp planning, and 3D perception for your industrial robots and peripherals.
The ROS-Industrial Consortium members' meeting will precede RoboBusiness. The Consortium is a membership organization providing cost-shared applied R&D for advanced factory automation. Consortium members drive new capabilities in ROS-I by championing Focused Technical Projects (FTPs) based on their near-term automation requirements. The ROS-Industrial Consortium Americas invites you to become a member and participate from 9 a.m. to noon on Wednesday, October 23, 2013, at RoboBusiness in Santa Clara, CA. Attendees will get the inside scoop on:
The progress of ROS-Industrial: MTConnect Bridge, support for new robots, and integration with MoveIt!
Consortium activities, financials, membership, and the progress of RIC Europe
Consortium roadmap presentation and voting
Available FTPs
Registration
Registration is required. Please contact Paul Hvass (paul.hvass@swri.org) for a registration promotional code for early bird pricing of $895 (regardless of registration date) that will alert the event organizers that you plan to attend the Consortium meeting. If you are not currently a Consortium member but are considering membership, please contact us.
The FH Aachen is offering a ROS Summer School for all interested students in the field of Robotics, Mechatronics and Mechanical Engineering. The Summer School
is planned for the 22nd July 2013 until the 2nd of August and will end with a competition with mobile robotics. There are plenty of different topics covered by the speakers:
Localization, Mapping, Navigation, RGBD cameras, Laser Range Finders, Arduino hardware, Image processing, SLAM, IMUs and a lot more. The hands-on workshop with a lot of
hardware elements, ends in assembling a "Robot Car" which is used for the later competition. In addition, we provide access to the well known Aldebaran Nao and Clearpath Robotic's Husky hardware in order to show different ROS implementations.
The ROS Summer School is designed to teach participants about how to get started with ROS; it is created for those who have had an interest in autonomous systems but didn't quite know how to get started. With that, organizers recommend students have a basic knowledge of Linux (Ubuntu) and one programming language such as Python or C++. The two-week program is made possible through Mobile Autonomous Systems and Cognitive Robotics (MASCOR), and key players including Prof. Walter Reichert, Prof. Stephan Kallweit, Prof. Alexander Ferrein, and Prof. Ingrid Scholl. Experiences such as this allow the ROS community to grow, and we are very excited to see what comes out of this event!
Event Title: ROS-Industrial Basic Developer's Class June 4-6, 2013
Event Description: We are delighted to invite you to attend the ROS-Industrial Basic Developer's Training class, which will be held June 4-6, at Southwest Research Institute, in San Antonio, TX. The class will provide a hands-on introduction to ROS and ROS-Industrial, and it will culminate with hardware integration exercises with live industrial robots and peripherals. The class is FREE to Full/Associate Members of the ROS-Industrial Consortium. Others may attend for a fee. For your convenience, we are also offering for you to purchase the preconfigured small form factor ROS-I PC that you will use during the class. To learn more about the class, please browse to the website: http://rosindustrial.org/ric/events.htm
Please join us this May for the second annual edition of ROSCon!
ROSCon 2013 is a chance for ROS developers of all levels, beginner to expert, to spend an extraordinary weekend learning from and networking with the ROS community. Get tips and tricks from experts and meet and share ideas with fellow developers from around the globe.
ROSCon is a developers' conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota (http://roscon.ros.org/2012), this year's ROSCon will be held in Germany. Similar to last year, the two-day program will comprise technical talks and tutorials that will introduce you to new tools and libraries, as well as teach you more about the ones you already know.
Once again we received an overwhelming number of session proposals, which made for some tough decisions in the review process. The 35 talks in the program include in-depth coverage of core libraries, like Octomap and RQT, multiple perspectives on timely topics like embedded systems and real-time control, and plenty of novel applications of ROS. And we an excellent keynote on MoveIt!, from Sachin Chitta of Willow Garage.
We have some great sponsors to thank: Bosch, Clearpath Robotics, Cyberbotics, Google, I Heart Engineering, Rethink Robotics, Schunk, Yaskawa Motoman, Yujin Robot, and Willow Garage. We're excited to have such strong industry support!
The first meeting of the Consortium will take place on March 6-7th. We will commence with a general information session, open to the public, on the afternoon of March 6. The Consortium Members' Meeting will be held March 7. For more information, please see the Consortium Events page.
ROSCon 2013 is a chance for ROS developers of all levels, beginner to expert, to spend an extraordinary weekend learning from and networking with the ROS community. Get tips and tricks from experts, network, and share ideas with fellow developers from around the globe.
ROSCon is a developers' conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota http://roscon.ros.org/2012 ) this year's ROSCon will be held in Stuttgart, Germany. Similar to last year, the two-day program will com prise technical talks and tutorials that will introduce you to new tools and libraries, as well as teach you more about the ones you already know. The bulk of the program will be 30-40 minute pre sen tations (some may be longer or shorter).
Want to present at ROSCon? Submit a proposal! For details on proposing, go to http://roscon.ros.org/
If you don't want to make a formal presentation, you should still bring your new project or idea to ROSCon!
There will be several sessions of Lightning Talks, which are 5-minute mini-talks that are scheduled just-in-time at the conference. There will also be open space for Birds-of-a-Feather (BoF) meetings, impromptu hacking sessions, and informal presentations.
On behalf of the ROSCon 2013 Organizing Committee:
Alexander Bubeck, Fraunhofer IPA
Tully Foote, Willow Garage
Ryan Gariepy, Clearpath Robotics
Brian Gerkey, Open Source Robotics Foundation
Florian Weisshardt, Fraunhofer IPA
Matthew Williamson, Rethink Robotics
ROS Industrial -- An Enabler for Industrial Robotics?
Development of Industrial Applications with ROS -- Experiences
October 17, 2012
The integration of hardware and software components into new
automation applications is still a big challenge regarding interface
adaptations, communication, conduction of components and integration
tests as well as optimization of parameters for the target
scenario. In addition, applications in the automation domain are
often developed from scratch with only limited software reuse.
Using component-based development in combination with reuse of
existing software and hardware components promises a significant
improvement in efficiency for application development.
A prominent example for a widely used component-based framework
is ROS, which focuses on code reuse in robotics research and
development and offers already great variety of mature robotic soft -
ware components (e.g. SLAM, motion planning, 2D/3D perception).
In this conference methods and procedures for the component based
development with ROS are presented that increase the reusability
of existing components. Furthermore, the ROS Industrial
initiative is introduced that matches existing ROS components to
the needs of industrial applications (e.g. quality assurance, robust -
ness, etc.). Concrete examples how ROS is already used in industrial
applications today are given in the conference.
We are looking forward to welcome you at Fraunhofer IPA at our
conference.
OBJECTIVES
In this conference we want to bring together representatives from
academia and industry to exchange experiences on application
development with ROS and clarify the needs of industry with
respect to ROS Industrial. The participants have the opportunity
to get information on the starting initiative of ROS Industrial and
generate and influence the goals, timelines and development
priorities of the community development.
Conference Topics:
Presentation of methods and procedures of component-based
development with ROS
Introduction of the ROS Industrial initiative
Examples of successful technology transfer from academia to
industrial applications
ROS for product development
TARGET AUDIENCE
This conference addresses developers of industrial robotic appli -
cations, system integrators and executive personal of small and
medium-sizeed enterprises as well as R&D division of larger companies
in the field of automation, logistics and production.
We've finished processing footage from ROSCon 2012 and are happy to
announce that videos of all the presentations (including the exciting
Lightning Talks) are now posted and freely available. See the
program for links to the videos.
That's over 11 hours of ROSCon video; enjoy! And thanks again to
everybody who made our inaugural ROSCon a success.
Thanks everyone for an amazing ROSCon 2012! The inaugural event exceeded our expectations, with over 200 attendees watching excellent, standing-room-only talks on all things ROS. ROS "Godfather", Morgan Quigley, kicked things with a talk that took us from ROS past to future, and the rest of the two-day schedule covered everything from useful core libraries (tf, URDF, Gazebo, openni_kinect, rosjava), to talks on robots using ROS (Robonaut, autonomous lawnmowers, humanoid, field robots), and much, much more. The event also served as an kickoff for the Open Source Robotics Foundation, which will act as a steward for ROS, Gazebo, and future ROSCon events.
Many of you have asked, and, yes, we're working hard now to process the video and post them online.
It took a lot of people to make ROSCon happen, so a special thanks to:
Thanks to Synapticon and I Heart Engineering for becoming ROSCon 2012 Silver Sponsors! You'll be able to meet representatives from both companies during the event.
Thanks again to our Founding/Platinum sponsors: Clearpath Robotics, Heartland Robotics, Willow Garage, Bosch, and Yaskawa. Thanks also to our Gold Sponsors, Yujin Robot and CoroWare.
Tully Foote of Willow Garage gave a presentation on "Open Source Robotics for the Home" which covers ROS, TurtleBot, and more. Video of this presentation is now available on fora.tv.
The ROS at ISR event is now over. We had a full amphitheater so I hope we'll be having a bunch of new ROS users very soon!
Once more thank you to everybody who helped and contributed for the presentation, which by the way is now available for download in pdf format at the event webpage. I will also be posting a presentation with notes soon.
Lino Marques, Gonçalo Cabrita, Pedro Sousa and David Portugal are hosting a "ROS Day" at ISR University of Coimbra on February 16th. The afternoon event will introduce ROS to robot robot software developers and algorithm researchers from ISR and DEEC.
We had a great time at the January 26th meeting of the Homebrew Robotics Club, which was held at Google. There were many quick show-and-tell demos of various hobby robots followed by the featured presentation, "ROS for the Rest of Us", given by Patrick Goebel. Patrick is the creator of Pi Robot and maintainer of pi-robot-ros-pkg. Patrick writes regularly about ROS on his website, including a tutorial on visual object tracking using ROS.
There were several ROS-related presentations during the show-and-tell. Tony Pratkanis presented his ROS + Neato platform, Melonee Wise and Tully Foote introduced the "Turtlebot" platform (iRobot Create + Kinect), and James Bowman demoed an Arduino board running a full ROS node.
There should also be several other quick ROS presentations, including a Tony Pratkanis presenting his ROS + Neato platform, and some Willow Garage presentations on ROS + Arduino, and ROS + Create + Kinect.
Sixty-five students spent the first week of November at the very first CoTeSys-ROS School on "Cognition-enabled Mobile Manipulation". These students focused on the challenges of personal robotics, like manipulating items in human environments. These students attended many lectures and also got hands-on experience with the PR2 robot and TUM-Rosie. They learned everything from basic ROS concepts, to navigation, perception, planning and grasping, knowledge processing, and reasoning. By the end of the week, they were able to program a robot to navigate to table, perceive objects on it, infer missing items, fetch the missing items, and bring them to the table -- an impressive feat.
The feedback on this first event was very positive. "Perhaps the most valuable was meeting researchers and other Ph.D students working in research areas closely related to my own, but of course the talks and tutorials themselves were almost as valuable; it would have taken much longer to learn all these things on my own," said one participant.
It's hard to believe, but it has now been three years since we set out to create an open source software platform for the robotics industry. That effort has come to be known as ROS, which initially began as a collaboration between the STAIR project at Stanford and the Personal Robots Program at Willow Garage. Just a few short years later, we're excited to see how many individuals and institutions have joined in this collaboration. ROS (for Robot Operating System) is completely open source (BSD) and is now in use around the world in North America, Europe, Asia and Australia. There are robots running on ROS indoors and out, above and below the sea, and even flying overhead.
As we celebrate this occasion, we thought it would be a good time to share the "State of ROS" and talk about what's next.
People often ask how many users are there of ROS. Due to the free nature of ROS, we simply don't know. What we do know is that since the ROS C Turtle release this past August, there have been over 15,000 unique visitors to the ROS C Turtle installation instructions, with over 6,000 unique visitors in October.
ROS has grown very quickly this past year. Below are a few charts showing the growth in the number of public ROS repositories and ROS packages. As large as the ROS community is, you can see that things are just getting started.
Universities Using ROS
Academic contributors are the backbone of the ROS community, providing nearly three-fourths of the public ROS repositories. These contributions are helping to push the bleeding edge of ROS capabilities, and are also expanding ROS to new robot platforms. In the process, they are creating new communities within ROS to collaborate at the hardware, software, and research levels.
These individuals and departments have greatly expanded the range of hardware that can be used with ROS. Thanks to their efforts, you can now use ROS with iRobot Creates (Brown University), Aldebaran Naos (Brown, Uni Freiburg), AscTec quadrotors (CCNY), Barrett arms (MIT), Velodynes (UT Austin/ART), Pioneers (USC, AMOR), Parrot AR.Drones (SIUE), and much, much more.
At the research level, the contributions are too broad to easily summarize. Whether you're doing research in 3D perception, manipulation, cognitive robotics, mapping, motion planning, controls, grasping, SLAM, HRI, or object recognition, there are ROS packages representing current research. We look forward to a world where "academic publication" refers to code as much as it does papers, and, thanks to the ROS community, we are starting to see that happen. We are also building tools to help researchers cite ROS code used in their publications.
What's even more exciting than seeing companies using ROS is organizations contributing open source software to the community. There are ROS repositories for Bosch, Shadow Robot, Aptima, Fraunhofer IPA, Robotino (maintained by REC) and Vanadium Labs. Meka and Skybotix are both providing open-source drivers for their hardware, and Thecorpora's Qbo is billed as an "open-source robot." More broadly, Yujin Robot has released their embedded tools for ROS and REC has ported ROS to Windows.
Companies developing software libraries for robotics have also been supportive of open source and ROS. Gostai completed the transition of the Urbi SDK to open source this year, and the 2.1 release added support for ROS. SRI released components from the Karto SLAM SDK as open source on code.ros.org and is supporting ROS integration.
Programs Using ROS
Various research programs are embracing ROS as a platform. ROS was created, in part, to support the PR2 Beta Program and encourage the exchange of ideas through software. This year, in addition to the official start of the PR2 Beta Program, there have been two DARPA programs announced that are using ROS: Maximum Mobility and Manipulation (M3) and ARM-S. The ARM-S program is providing a shared manipulation platform with ROS drivers that will enable participants to work with the ROS community.
And in Europe, there is the BRICS Project, which aims to identify and promote good development practice and reusable components for robotics. The BRICS participants are making use of many ROS packages, and working to integrate them with other robot software systems.
Building Bridges
One of the values of being open source is that it's much easier to collaborate than compete. With so much great open source software out there, it's wonderful that various robot software frameworks can build on each other's strengths rather than forcing users to choose between them. This year we've seen ROS integrated with OpenRTM, Urbi, and PIXHAWK. There is also improved integration with Orocos.
ROS has also been integrated with other programming languages thanks to members of the community. Tim Niemueller has contributed a Lua client library for ROS, which also helps provide integration with the Fawkes Framework. Brown University has contributed a Javascript library for ROS that lets you control ROS-based robots directly from a Web browser.
We strive to make ROS as open as possible. From ROS's early days hosted on SourceForge, to a community-editable wiki, to open code reviews, we've done our best to perform ROS development out in full view of the public. However, we recognize that we can do more and are pursuing two major efforts to do so.
First, we created a new process for proposing changes to ROS. This process, called ROS Enhancement Proposals (REPS), empowers you to contribute to ROS development. It also provides better insight into current efforts.
Our second effort lays the groundwork for a potential ROS Foundation, an organization for the long-term development of ROS. We are inspired by the Mozilla Foundation, Apache Software Foundation, and GNOME Foundation, which act as stewards for public technologies. These foundations were not created overnight, nor were they created alone. We have already received invaluable advice from our friends at Mozilla on how to get started; now we need your help.
We invite you to get involved -- how can you play a role? We need developers for the core libraries, researchers to push the envelope, and companies to bring it together. As a community, these are all things we already have and are already doing. All we need to do is take the next step together.
This third year for ROS has shown us the size and strength of the ROS community. As our community continues to grow, we hope that we can better combine our strengths to meet the challenge of creating an open platform for robotics.
Concluding Thoughts
Just a few short years ago we set out to create an open software platform that lets roboticists focus on innovation, rather than reinventing the wheel; an open source robot operating system that is free for others to use, change and commercialize upon.
Three years later we are really excited by our community and what it has done. Whether you're talking about robots, libraries, companies, or research labs, the growth and breadth that we have seen has been stunning. We are grateful for your participation and have done our best to respond to your needs by making ROS better and more open. We're looking forward to the next three years (and many years after that), working together to build what's next.
We had a really great time meeting everyone at ICRA and hearing about the various ways in which you are using ROS. We already knew about some of the robots using ROS, but we didn't expect to hear that ROS is already in use on boats and quad-rotor helicopters. There are also a dozen different robots using the ROS navigation stack. Thanks to all of you who took the time to talk with us, participate in tutorials, and show us new uses of ROS.
It was exciting to see open source gaining momentum with commercial robotics companies. Gostai was there to promote the newly open source URBI, SRI was promoting its open-source Karto mapping library, and Robosoft was also promoting its new open source offering with the Kompai robot. There should be a lot more news on the open-source front soon, so stay tuned!
Many of you asked how you can get your open-source repositories added to the ROS.org index. The answer is easy: just send us an e-mail on ros-users. We'd love to hear about what you're doing and we're looking forward to doing more "Robots Using ROS" posts in the future.
ROS will be on display at ICRA 2010. Here are some of the highlights:
Around the Floor
Willow Garage will be demoing various ROS libraries and tools in their booth.
Karto Robotics from SRI will be demoing in the Willow Garage and Gostai booths.
Scheduled Events
Radu Bogdan Rusu and Matei Ciocarlie will give a talk on, "Combining Perception and Manipulation in ROS" as part of the Workshop on Representations for Object Grasping and Manipulation. This will discuss the upcoming point cloud library, pcl, and manipulation stacks which are currently being developed for future versions of ROS. When: Monday May 3, 12:00pm. Where: Dena'ina Center, Tubughnenq' 4.
Care-O-bot 3 and PR2 will participating in the Mobile Manipulation Challenge. Where: Idlughet 3. When: Wednesday May 4th, 14:15 - 15:00 (PR2), Thursday May 5th, 15:00 - 15:45 (Care-O-bot 3).
ROS Tutorial will take place on Friday. This event is full.
Anthony Mallet (LAAS/CNRS) will present "GenoM3: Building Middleware-Independent Robotic Components", which aims to bring greater interoperability among robotics platforms. When: Thursday, May 6, 2010, 15:20−15:35. Where: Egan Center Lower Level Room 6.